kramann.info
© Guido Kramann
Home
|
ImpressumDatenschutz
|
SoSe2025
|
WS2025 26
|
SoSe2026
|
esp32AV
|
TWATCH
|
TWATCH EN
|
Archiv
|
KF
|
Informatik1
|
Informatik2Material
|
Technikphilosophie
|
Einachser
|
jahre
|
UbiMus
|
Informatik3
|
html5 js
|
Linux
|
Java
|
Scilab
|
Mikrocontroller
|
AOGscript
|
Mikro17
|
Simulationstechnik
|
Kinetik
|
NFT
|
Regelungssysteme
|
Echtzeitsysteme
|
nexys
|
FPGA
|
Echtzeitsysteme2
|
COACH2
|
COACH3
|
EmbSyst
|
Echtzeit3
|
Mikroprozessoranwendungen
|
Android
|
Processing
|
Deep Learning
|
Robuste Systemintegration
|
FTSD
|
AV
|
Jetson
|
ECADE
|
clb
|
kiba
|
Beispielseiten
|
AOGdogma
|
Artistic Research
|
Soundinstallation
|
Android Proc
|
VSI
|
ETEST
|
Arduino
|
Klanginstallation
|
AOG
|
Musik
Login:
Passwort:
Mikrocontroller
1 Einfuehrung
..
1.1 Entwicklungsgeschichtliches
..
1.2 Maschinensprache
..
1.3 Assemblerbeispiel
..
1.4 Sprachwahl
..
1.5 Praxis
....
1.5.1 Digital_IO
....
1.5.2 Byteoperationen
....
1.5.3 AVR_Studio
....
1.5.4 Testboard
....
1.5.5 Aufgaben
....
1.5.6 Do_it_yourself
......
1.5.6.1 Ampel
......
1.5.6.2 Programmierer
..
1.6 Literatur
..
1.7 Programmierer
....
1.7.1 Bauverlauf
....
1.7.2 KurzreferenzLow
....
1.7.2 Kurzreferenz_16PU
..
1.8 Uebung1
..
1.9 BoardAtHome
....
1.9.1 Software
....
1.9.2 Hardware
....
1.9.3 Knoppix
....
1.9.4 Aufbau
....
1.9.5 LED
2 Oszillator
..
2.1 Assembler
..
2.2 Interner_RC
..
2.3 Quarz
..
2.4 Taktgenerator
3 DigitalIO
..
3.1 Elektrische_Eigenschaften
..
3.2 Pullup_Widerstaende
..
3.3 Bitmasken_Eingang
..
3.4 Bitmasken_Ausgang
..
3.5 Tic_Tac_Toe
....
3.5.1 DuoLEDs
....
3.5.2 Schaltplan
....
3.5.3 Spielfeld
....
3.5.4 Anwahl
....
3.5.5 Kontrolle
..
3.6 Laboruebung2
..
3.7 Laboruebung2_alt
4 PWM
..
4.1 Prinzip
..
4.2 Nutzen
..
4.3 Generierung
..
4.4 Programmierung
..
4.5 Servos
..
4.7 Laboruebung3
..
4.8 LoesungUE3
..
4.9 Uebung6
5 LichtKlangKugeln
..
5.1 LED
..
5.2 RGB
..
5.3 Sensoren
..
5.4 lautsprecher
..
5.5 tonerzeugung
6 UART
..
6.1 Bussysteme
..
6.2 UART
..
6.3 RS232
..
6.4 Hardware
..
6.5 Senden
..
6.6 Hyperterminal
..
6.7 Empfangen
..
6.8 Broadcast
..
6.9 Uebung4
7 Infrarot
..
7.1 schalten
..
7.2 seriell
..
7.3 Uebung
8 OOP
..
8.1 Probleme
..
8.2 Konzept
..
8.3 Statisch
..
8.4 Datentypen
..
8.5 RS232
....
8.5.1 Prozedural
....
8.5.2 Analyse
....
8.5.3 Umsetzung
....
8.5.4 Vererbung
....
8.5.5 Statisch
....
8.5.6 Performance
..
8.6 Fahrzeug
9 ADW
..
9.1 ADW
..
9.2 Zaehler
10 Peripherie
..
10.1 RS232Menue
..
10.2 ASCIIDisplay
..
10.3 Tastenmatrix
..
10.4 Schrittmotor
..
10.5 Zaehler
..
10.6 Uebung7
11 SPI
..
11.1 Testanordnung
..
11.2 Register
..
11.3 Test1
..
11.4 Test2_Interrupt
..
11.5 Test3_2Slaves
..
11.6 Laboruebung
12 EEPROM
13 I2C
..
13.1 MasterSendByte
..
13.2 MasterSend2Bytes
..
13.3 MasterReceiveByte
..
13.4 MasterReceive2Bytes
14 Anwendungen
..
14.1 Mechatroniklabor
....
14.1.1 Biegelinie
....
14.1.2 Ausbruchsicherung
....
14.1.3 Einachser
....
14.1.4 AV
....
14.1.5 Vierradlenkung
....
14.1.6 Kommunikation
..
14.2 Sinuserzeugung
....
14.2.1 Variante1
....
14.2.2 Variante2
....
14.2.3 Variante3
....
14.2.4 Variante4
..
14.3 Laboruebung8
..
14.4 Loesung_Ue8
..
14.5 SPI_Nachtrag
20 Xubuntu
kramann.info
© Guido Kramann
Home
|
ImpressumDatenschutz
|
SoSe2025
|
WS2025 26
|
SoSe2026
|
esp32AV
|
TWATCH
|
TWATCH EN
|
Archiv
|
KF
|
Informatik1
|
Informatik2Material
|
Technikphilosophie
|
Einachser
|
jahre
|
UbiMus
|
Informatik3
|
html5 js
|
Linux
|
Java
|
Scilab
|
Mikrocontroller
|
AOGscript
|
Mikro17
|
Simulationstechnik
|
Kinetik
|
NFT
|
Regelungssysteme
|
Echtzeitsysteme
|
nexys
|
FPGA
|
Echtzeitsysteme2
|
COACH2
|
COACH3
|
EmbSyst
|
Echtzeit3
|
Mikroprozessoranwendungen
|
Android
|
Processing
|
Deep Learning
|
Robuste Systemintegration
|
FTSD
|
AV
|
Jetson
|
ECADE
|
clb
|
kiba
|
Beispielseiten
|
AOGdogma
|
Artistic Research
|
Soundinstallation
|
Android Proc
|
VSI
|
ETEST
|
Arduino
|
Klanginstallation
|
AOG
|
Musik
Login:
Passwort:
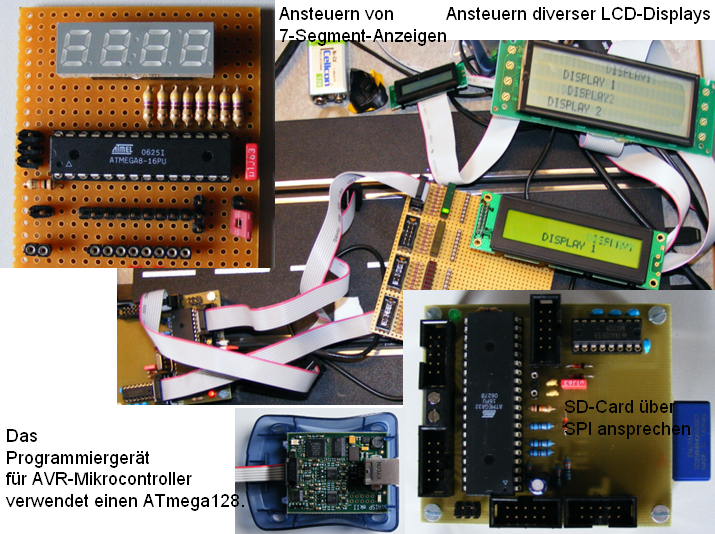
Kommunikation
Kurzbeschreibung
Die folgenden Schaltungen realisieren unterschiedliche Möglichkeiten der Kommunikation zwischen einem Mikrocontroller und einem Benutzer.
Weitere Erläuterungen werden im Rahmen der Vorlesung gegeben.
Bild 0-1: Biegelinie