Nutzen - Wozu werden PWM-Signale eingesetzt?
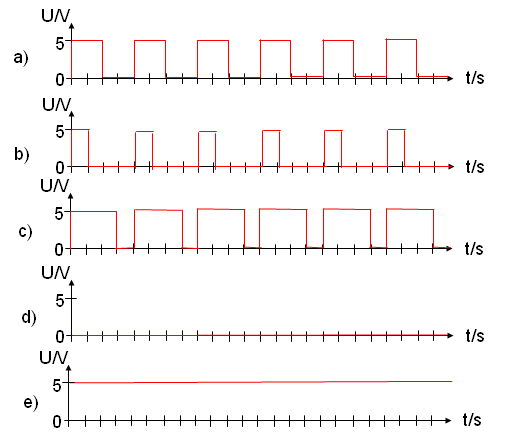
Bild 0-1: Beipsiele für PWM-Signale
- Angenommen, die Spannung des High-Wertes bei den fünf obigen PWM-Beispielen wäre 5 Volt.
- Dann ergibt sich bei den einzelnen Beispielen folgender Mittelwert der elektrischen Spannung:
- a) 2,5 Volt
- b) 1,25 Volt
- c) 3,75 Volt
- d) 0 Volt
- e) 5 Volt
- Weiter angenommen, die Frequenz des PWM-Signals wäre relativ hoch, z.B. 2000Hz.
- Dann läßt sich durch die Parallelschaltung eines Kondensators am Ausgang leicht daraus der Mittelwert gewinnen.
- Auf den Kondensator kann meistens verzichtet werden.
- Um beispielsweise die Versorgungsspannung eines DC-Motors durch das PWM-Signal vorzugeben, muß dieses noch verstärkt werden, da der Mikrocontroller an seinen Ausgängen nur Ströme im Bereich von 100mA verkraftet.
- Da lediglich ein Rechtecksignal verstärkt werden muß, kann ein recht einfacher Verstärker verwendet werden.
- Solche Treiber oder Motortreiber werden als ICs angeboten und benötigen wenige zusätzliche externe Bauelemente.
- Das folgende Bild zeigt das Prinzip, wie ein DC-Motor über das PWM-Signal eines Mikrocontrollers angesteuert werden kann.
- Es folgt ein konkreter Schaltplan mit dem ATmega32 und dem Motortreiber LMD18200 und schließlich ein Foto der Schaltung des Treibers.
|

Bild 0-2: DC-Motoransteuerung, Schema
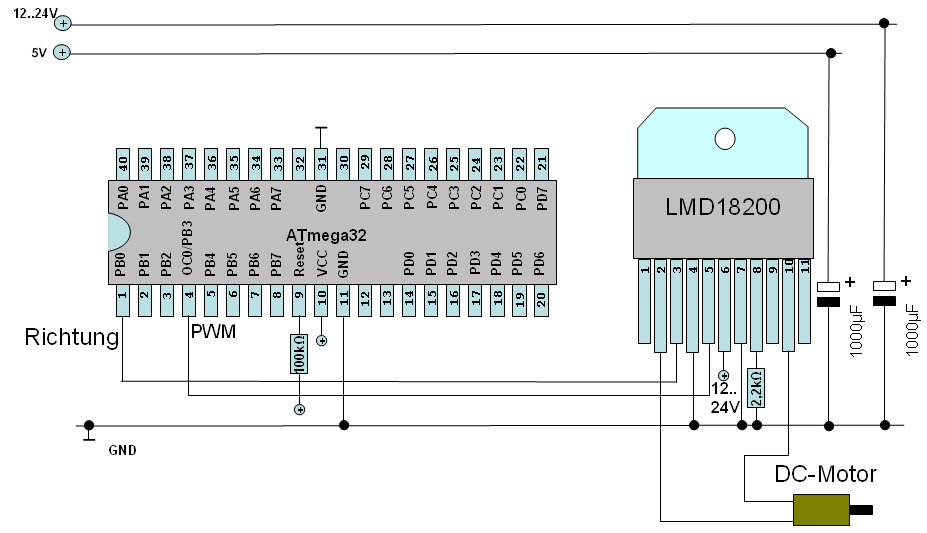
Bild 0-3: DC-Motoransteuerung, Schaltplan
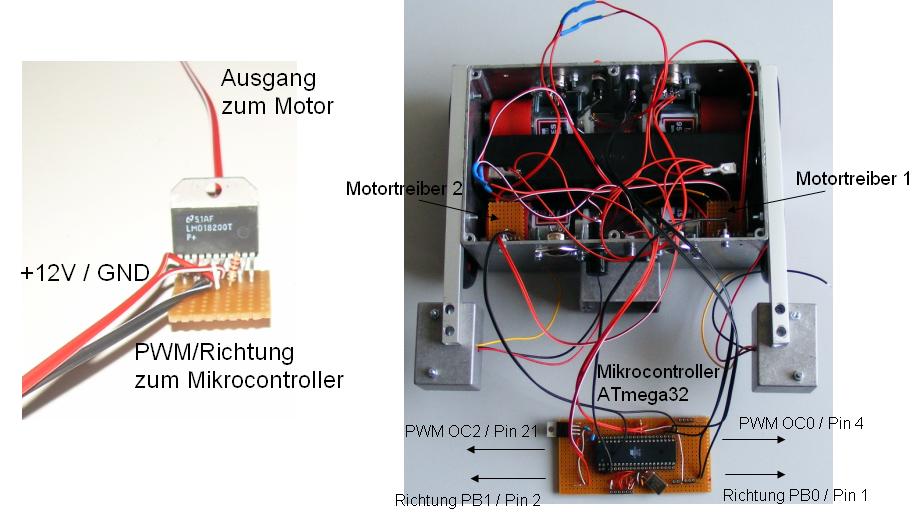
Bild 0-3: DC-Motoransteuerung, Foto
- Der verwendete Motortreiber verträgt Spannungen bis 55Volt und Ströme bis 3Ampere.
- Zu Regelungszwecken verfügt er auch über einen Stromsensor.
- Das Grundprinzip solcher Motortreiber ist die H-Brücken-Schaltung.
- Hier der Prinzip aufbau mit Transistoren:
|
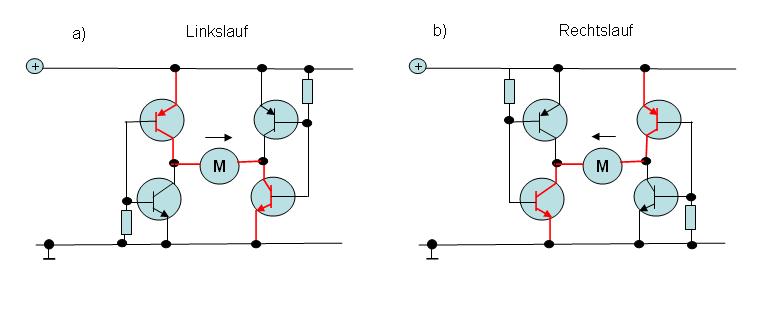
Bild 0-4: Prinzip H-Brücke: a) NPN-Transistor oben links und PNP-Transistor unten links leiten, b) Umkehrfall, Motor umgepolt (Links/Rechts frei gewählt).