Externer Taktgenerator
- Der externe Taktgenerator wird z.B. verwendet, wenn die Taktung mehrer Bausteine synchron erfolgen soll (z.B. zur Verbessrung der Datenübertragungsrate bei einem Bussystem), oder wenn die Taktrate sich ändern soll (z.B. für Aufweck-Mechanismus - langsamer Takt heißt geringer Verbrauch).
- Achtung: werden versehentlich die Fusebits so umgestellt, dass externe Taktung verwendet wird, so ist der Baustein "tot", wenn keine solche anliegt.
|
Beschaltung bei der Verwendung eines externen Taktgenerators
- Der Taktgenerator sollte ein TTL-Rechtecksignal liefern und wird einfach an den Pin 13 (XTAL 1) des ATmega32 angeschlossen, während Pin 12 (XTAL2) in diesem Fall unbeschaltet bleibt.
|
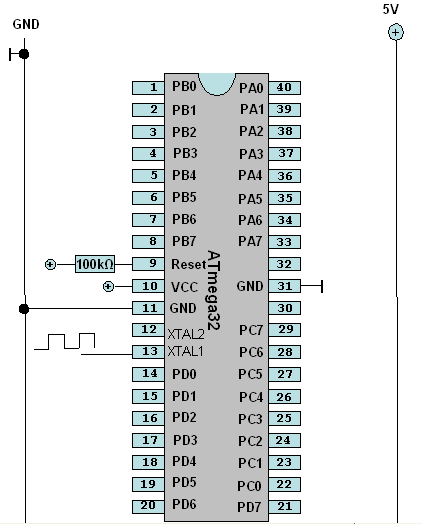
Bild 0-1: Anschluß eines externen Taktgenerators an den ATmega32