Ansteuerung eines zweiphasigen Schrittmotors
|
Technische Daten
- Schrittwinkel 3,6° (100 Schritte) - Betriebsspannung 12 V - Strangwiderstand 25 Ohm - Strangstrom 480 mA - Drehmoment (Haltemoment) 8 (60) mNm Motormaße ohne Welle (LxBxH): 37x42x42 mm, Wellenmaße (Lxø): 10x5 mm
Code 0-1: Technische Daten

Bild 0-1: Zweiphasiger Schrittmotor
Verbindung mit dem Testboard
|
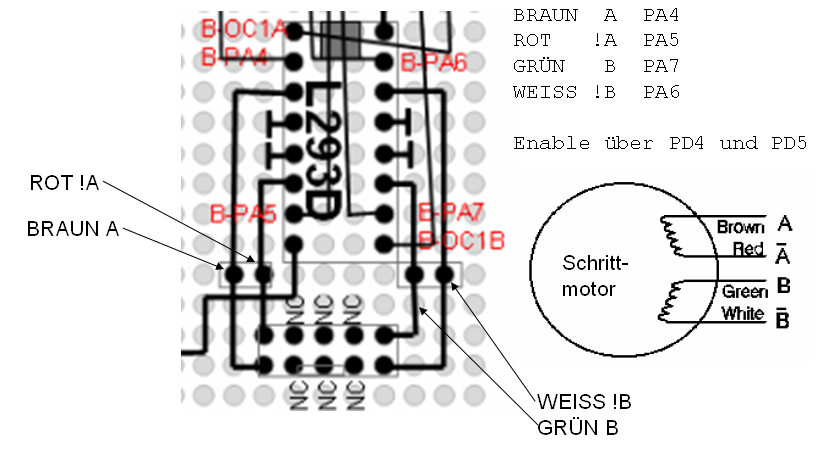
Bild 0-1: Verbindung des Schrittmotors mit dem Testboard.
Ansteuerung
|
PA 7 6 5 4
A B !A !B
1 1 0 0
0 1 1 0
0 0 1 1
1 0 0 1
...
Code 0-3: Phasendurchlauf für fünf Schritte.
|
PA 7 6 5 4 A !A !B B 1 0 0 1 1 0 1 0 0 1 1 0 0 1 0 1
Code 0-3: Phasendurchlauf für fünf Schritte mit dem Testboard.