Übung 1
(EN google-translate)
(PL google-translate)
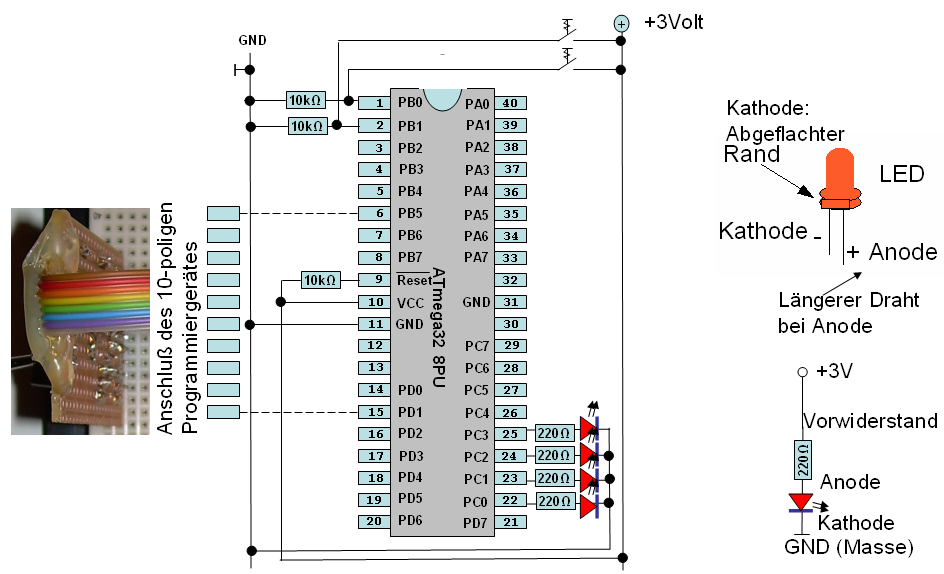
Bild 0-1: Stromlaufplan für die erste Mikrocontroller-Übung
Aufgabe 1
- Bauen Sie obige Schaltung auf einem Steckbrett auf.
- Die Taster werden durch einfache isolierte Klingeldrähte realisiert.
- Lassen Sie diese vom Dozenten kontrollieren, bevor Sie sie in Betrieb nehmen.
|
Aufgabe 2
- Überprüfen Sie, ob Ihre Schaltung funktioniert, indem Sie nach Anschluß des Programmiergerätes an PC und Mikrocontroller und nach Anlegen der 3Volt-Spannung unter Linux folgenden Befehl im Root-Terminal eingeben:
- avrdude -c ponyser -p m32 -P /dev/ttyS0 -v
|
Aufgabe 3
- Starten Sie nun avreditor durch Doppelklick auf das Desktop-Symbol (unter Linux).
- Modifizieren Sie das Programm im Programmeditor so, dass alle vier LEDs dauerhaft leuchten.
|
Aufgabe 4
- Schreiben Sie nun ein Programm, bei dem alle vier LEDs blinken.
|
Aufgabe 5
- Schreiben und Testen Sie nun ein Programm, bei dem die LED bei PC0 solange leuchtet, solange Sie den Taster bei PB0 drücken.
|
Aufgabe 6
- Schreiben Sie nun ein Programm, bei dem durch Betätigen von Taster PB0 PORTC inkrementiert und mit PB1 dekrementiert wird.
|