Mechatroniklabor
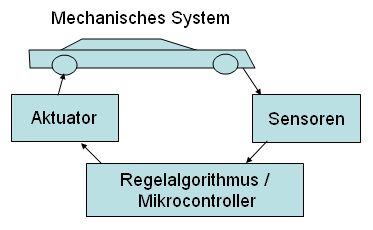
Bild 0-1: Schema eines mechatronischen Systems
- Die Versuche im Mechatroniklabor sind das Resultat vieler sich ständig ändernder, oft aufeinander aufbauenender Projekte.
- Die Projekte werden teilweise von den Lehrenden selber bearbeitet, zu einem großen Teil aber als Semester- oder Abschlußarbeiten der Studierenden vergeben.
- Ziel dieser Entwicklungen ist es, nach einigen Jahren eine Vielzahl an interessanten mechatronischen Anwendungen zu haben.
- Eine zentrale Rolle bei der technischen Umsetzung der Projekte spielen mittlerweile die Mikrocontroller.
- Es erfordert ein gehöriges Maß an Voraussicht, Verantwortungsbewußtsein und guter Dokumantation seitens derjenigen , die die Projekte bearbeiten, dass dann auf den entstehenden Resultate tatsächlich in weiterfühenden Folgeprojekten aufgebaut werden kann.
- In der Mechatronik geht es immer darum, mechanischen Systemen durch die Applikation von Sensoren und Aktuatoren, die über einen Regelalgorithmus verkoppelt sind, ein neues Verhalten aufzuprägen.
- Hieraus ergeben sich eine Reihe an typischen Problemen, die mit Hilfe von Mikrocontrollern gelöst werden müssen.
- Deshalb ist es auch möglich im folgenden die typischen Anwendungsfälle für die Mikrocontrollertechnik aufzuzeigen:
|
Bild 0-2: Typische Aufgaben, die in der Mechatronik mit Mikrocontrollern gelöst werden müssen.
- Neben diesen Hauptaufgaben, fallen weitere Aufgaben an, die mit Mikrocontrollern gelöst werden, die mit Kommunikation zu tun haben.
- Mensch - Maschine-Kommunikation - Der Mikrocontroller muß Rückmeldung über seinen innneren Zustand an die Entwickler geben können und auch interaktive Elemente bereitstellen, um an bestimmte Bedingungen anpaßbar zu sein.
- Maschine - Maschine-Kommunikation - Der Mikrocontroller hat eine recht begrenzte Leistung. Es lassen sich aber über die verfügbaren Bussysteme leicht Netzwerke von Mikrocontroller bilden, die unterschiedliche Aufgaben in einem Gesamtsystem ergeben und miteinander kommunizieren.
|
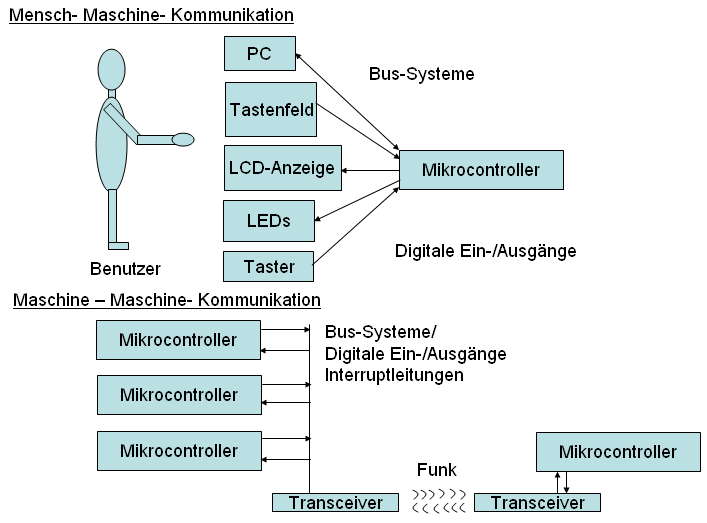
Bild 0-3: Nebenaufgaben des Mikrocontrollers aus dem Themenfeld "Kommunikation".