Vorversuch zu Tic Tac Toe: Verwendung von Duo-LEDs
|
#include<avr/io.h>
int main()
{
unsigned long pause;
unsigned char zustand = 0;
DDRA = 0b00000011;
DDRC = 0b11111111;
//Zweipolige DUO-LED, Kathode an PA0, Anode an PA1
while(1)
{
PORTC = zustand;
if(zustand==0) //LED aus
{
PORTA &= 0b11111100;
}
else if(zustand==1) //LED grün
{
PORTA &= 0b11111100;
PORTA |= 0b00000001;
}
else //LED rot
{
PORTA &= 0b11111100;
PORTA |= 0b00000010;
}
for(pause=0;pause<1000000;pause++);
zustand++;
zustand%=3;
}
return 0;
}
Code 0-1: WEchsler zwischen den Zuständen aus, grün und rot.
 Projekt Download duoled.zip
Projekt Download duoled.zip

Bild 0-1: Gewöhnliche LED
|
PA1 PA0 DUO-LED 0 0 aus 0 1 grün 1 0 rot 1 1 aus
Code 0-1: Zuordnung von Leuchtfarbe und Zustand der digitalen Aisgänge PA0 und PA1
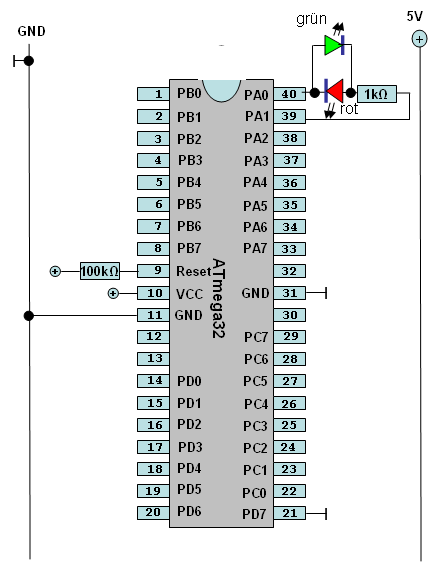
Bild 0-2: Schaltplan zum Versuch mit DUO-LED
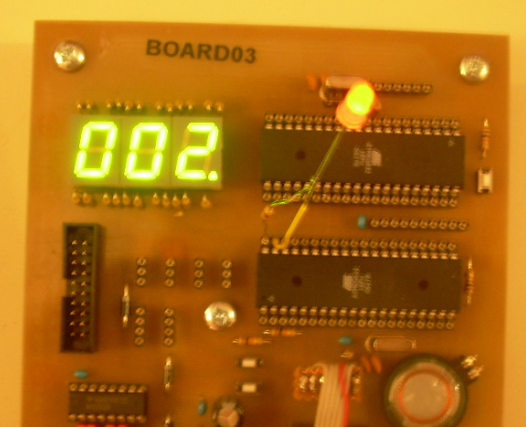
Bild 0-2: Aufbau zum Versuch mit DUO-LED