Servos
- Servos können direkt über PWM-Signale angesprochen werden.
- Über die Pulsbreite des PWM-Signals wird der aktuelle Winkel des Servos festgelegt.
- Die Periodendauer des für einen Servo bestimmten PWM-Signals sollte zwischen 10 und 20 Millisekunden sein.
- Eine Dauer des High-Pegels des PWM-Signals von 1,5 Millisekunden sorgt für die Mittelstellung des Servos.
- Eine Dauer des High-Pegels des PWM-Signals von 1,0 Millisekunden läßt ihn in eine Stellung von -45o fahren.
- Eine Dauer des High-Pegels des PWM-Signals von 2,0 Millisekunden läßt ihn in eine Stellung von +45o fahren.
- Servos haben in der Regel drei Anschlüsse: rot +5V, schwarz Masse, weiß oder gelb: PWM-Eingang.
|
Reproduktion dieser Einstellungen mit Hilfe des Testboards:
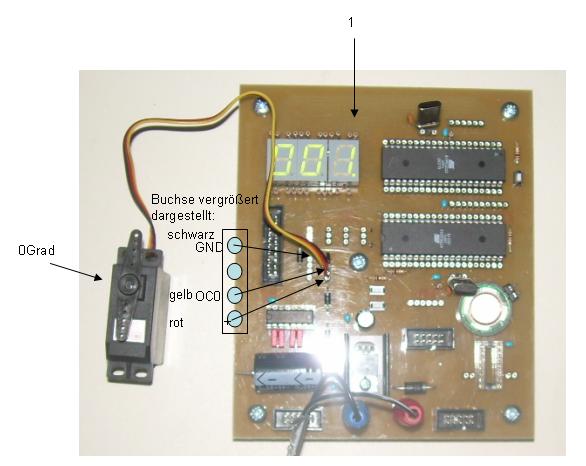
Bild 0-1: 0 Grad-Stellung - kein Taster gedrückt - Anzeige 1.
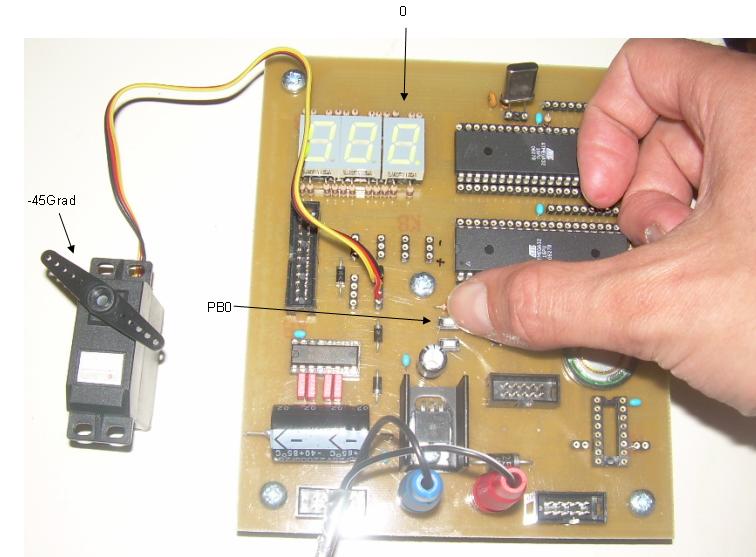
Bild 0-2: -45 Grad-Stellung - Taster bei PB0 gedrückt - Anzeige 0.
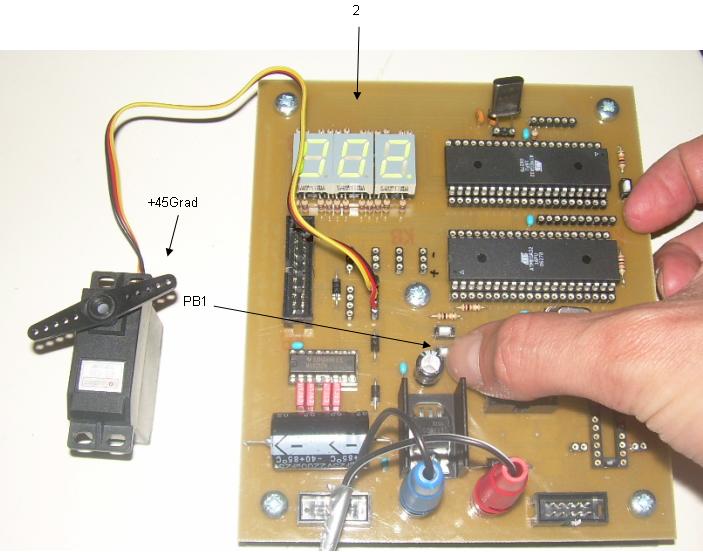
Bild 0-3: +45 Grad-Stellung - Taster bei PB1 gedrückt - Anzeige 2.