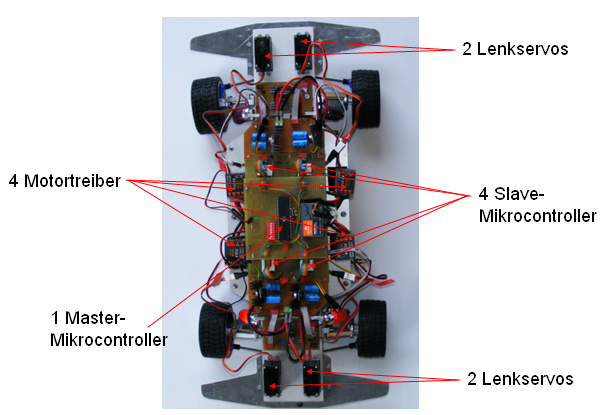
Bei diesem Fahrzeug-Modell werden alle vier Räder getrennt angetrieben und gelenkt.
Dadurch sind Fahrmanöver möglich, die mit herkömmlichen Automobilen nicht möglich sind, so läßt sich durch gleichzeitiges Einschlagen der Vorder- und Hinterräder beispielsweise der Webderadius verkleinern.
Außerdem läßt sich die Dynamik des Fahrzeugs durch die aktiven Elemente verändern, so ist beispielsweise ein elektronisches Differential realisierbar.
Weitere Erläuterungen werden im Rahmen der Vorlesung gegeben.