kramann.info
© Guido Kramann
Home
|
ImpressumDatenschutz
|
SoSe2025
|
WS2025 26
|
SoSe2026
|
esp32AV
|
TWATCH
|
TWATCH EN
|
Archiv
|
KF
|
Informatik1
|
Informatik2Material
|
Technikphilosophie
|
Einachser
|
jahre
|
UbiMus
|
Informatik3
|
html5 js
|
Linux
|
Java
|
Scilab
|
Mikrocontroller
|
AOGscript
|
Mikro17
|
Simulationstechnik
|
Kinetik
|
NFT
|
Regelungssysteme
|
Echtzeitsysteme
|
nexys
|
FPGA
|
Echtzeitsysteme2
|
COACH2
|
COACH3
|
EmbSyst
|
Echtzeit3
|
Mikroprozessoranwendungen
|
Android
|
Processing
|
Deep Learning
|
Robuste Systemintegration
|
FTSD
|
AV
|
Jetson
|
ECADE
|
clb
|
kiba
|
Beispielseiten
|
AOGdogma
|
Artistic Research
|
Soundinstallation
|
Android Proc
|
VSI
|
ETEST
|
Arduino
|
Klanginstallation
|
AOG
|
Musik
Login:
Passwort:
Mikrocontroller
1 Einfuehrung
..
1.1 Entwicklungsgeschichtliches
..
1.2 Maschinensprache
..
1.3 Assemblerbeispiel
..
1.4 Sprachwahl
..
1.5 Praxis
....
1.5.1 Digital_IO
....
1.5.2 Byteoperationen
....
1.5.3 AVR_Studio
....
1.5.4 Testboard
....
1.5.5 Aufgaben
....
1.5.6 Do_it_yourself
......
1.5.6.1 Ampel
......
1.5.6.2 Programmierer
..
1.6 Literatur
..
1.7 Programmierer
....
1.7.1 Bauverlauf
....
1.7.2 KurzreferenzLow
....
1.7.2 Kurzreferenz_16PU
..
1.8 Uebung1
..
1.9 BoardAtHome
....
1.9.1 Software
....
1.9.2 Hardware
....
1.9.3 Knoppix
....
1.9.4 Aufbau
....
1.9.5 LED
2 Oszillator
..
2.1 Assembler
..
2.2 Interner_RC
..
2.3 Quarz
..
2.4 Taktgenerator
3 DigitalIO
..
3.1 Elektrische_Eigenschaften
..
3.2 Pullup_Widerstaende
..
3.3 Bitmasken_Eingang
..
3.4 Bitmasken_Ausgang
..
3.5 Tic_Tac_Toe
....
3.5.1 DuoLEDs
....
3.5.2 Schaltplan
....
3.5.3 Spielfeld
....
3.5.4 Anwahl
....
3.5.5 Kontrolle
..
3.6 Laboruebung2
..
3.7 Laboruebung2_alt
4 PWM
..
4.1 Prinzip
..
4.2 Nutzen
..
4.3 Generierung
..
4.4 Programmierung
..
4.5 Servos
..
4.7 Laboruebung3
..
4.8 LoesungUE3
..
4.9 Uebung6
5 LichtKlangKugeln
..
5.1 LED
..
5.2 RGB
..
5.3 Sensoren
..
5.4 lautsprecher
..
5.5 tonerzeugung
6 UART
..
6.1 Bussysteme
..
6.2 UART
..
6.3 RS232
..
6.4 Hardware
..
6.5 Senden
..
6.6 Hyperterminal
..
6.7 Empfangen
..
6.8 Broadcast
..
6.9 Uebung4
7 Infrarot
..
7.1 schalten
..
7.2 seriell
..
7.3 Uebung
8 OOP
..
8.1 Probleme
..
8.2 Konzept
..
8.3 Statisch
..
8.4 Datentypen
..
8.5 RS232
....
8.5.1 Prozedural
....
8.5.2 Analyse
....
8.5.3 Umsetzung
....
8.5.4 Vererbung
....
8.5.5 Statisch
....
8.5.6 Performance
..
8.6 Fahrzeug
9 ADW
..
9.1 ADW
..
9.2 Zaehler
10 Peripherie
..
10.1 RS232Menue
..
10.2 ASCIIDisplay
..
10.3 Tastenmatrix
..
10.4 Schrittmotor
..
10.5 Zaehler
..
10.6 Uebung7
11 SPI
..
11.1 Testanordnung
..
11.2 Register
..
11.3 Test1
..
11.4 Test2_Interrupt
..
11.5 Test3_2Slaves
..
11.6 Laboruebung
12 EEPROM
13 I2C
..
13.1 MasterSendByte
..
13.2 MasterSend2Bytes
..
13.3 MasterReceiveByte
..
13.4 MasterReceive2Bytes
14 Anwendungen
..
14.1 Mechatroniklabor
....
14.1.1 Biegelinie
....
14.1.2 Ausbruchsicherung
....
14.1.3 Einachser
....
14.1.4 AV
....
14.1.5 Vierradlenkung
....
14.1.6 Kommunikation
..
14.2 Sinuserzeugung
....
14.2.1 Variante1
....
14.2.2 Variante2
....
14.2.3 Variante3
....
14.2.4 Variante4
..
14.3 Laboruebung8
..
14.4 Loesung_Ue8
..
14.5 SPI_Nachtrag
20 Xubuntu
kramann.info
© Guido Kramann
Home
|
ImpressumDatenschutz
|
SoSe2025
|
WS2025 26
|
SoSe2026
|
esp32AV
|
TWATCH
|
TWATCH EN
|
Archiv
|
KF
|
Informatik1
|
Informatik2Material
|
Technikphilosophie
|
Einachser
|
jahre
|
UbiMus
|
Informatik3
|
html5 js
|
Linux
|
Java
|
Scilab
|
Mikrocontroller
|
AOGscript
|
Mikro17
|
Simulationstechnik
|
Kinetik
|
NFT
|
Regelungssysteme
|
Echtzeitsysteme
|
nexys
|
FPGA
|
Echtzeitsysteme2
|
COACH2
|
COACH3
|
EmbSyst
|
Echtzeit3
|
Mikroprozessoranwendungen
|
Android
|
Processing
|
Deep Learning
|
Robuste Systemintegration
|
FTSD
|
AV
|
Jetson
|
ECADE
|
clb
|
kiba
|
Beispielseiten
|
AOGdogma
|
Artistic Research
|
Soundinstallation
|
Android Proc
|
VSI
|
ETEST
|
Arduino
|
Klanginstallation
|
AOG
|
Musik
Login:
Passwort:
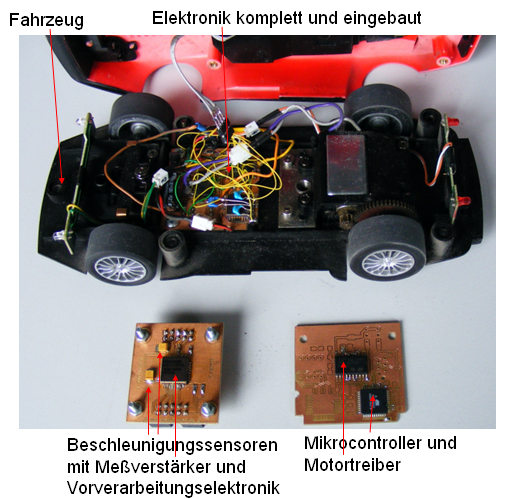
Ausbruchsicherung
Kurzbeschreibung
Mit "Ausbruchsicherung" ist gemeint, dass das Ausbrechen der Hinterachse eines Autos mit Heckantrieb in Kurven vermieden werden soll.
Modellhaft soll dies mit einer mechatronischen Applikation bei einem Carrera-Auto umgesetzt werden.
Ein Gyro-Sensor liefert über SPI, oder analog ein Signal an einen Mikrocontroller, das proportional zur Querbeschleunigung des Fahrzeugs ist.
Überschreitet diese einen vorgegebenen Schwellwert, so wird das an den Motor gehende PWM-Signal gedrosselt.
Weitere Erläuterungen werden im Rahmen der Vorlesung gegeben.
Bild 0-1: Biegelinie