Basiskonzept für die objektorientierte Programmierung des ATmega32
Forderungen
Wiederverwendbarkeit: Reibungsfreies Zusammenarbeiten
- Bei Mikrocontroller-Programmen greifen viele Programmteile auf die integrierte Peripherie des Mikrocontrollers zu.
- Beispiele für diese Peripherie sind die A/D-Wandler, die RS232-Schnittstelle, Timerfunktionen etc.
- Es ist dabei wichtig zu gewährleisten, dass diese Programmteile reibungsfrei zusammenarbeiten.
- Im folgenden Bild sind als Beispiel für das komplexe Zusammenspiel mehrerer Teilsysteme im Mikrocontroller die Komponenten für das Frequenzmess-Modul der vorangegangenen Veranstaltung dargestellt:
|
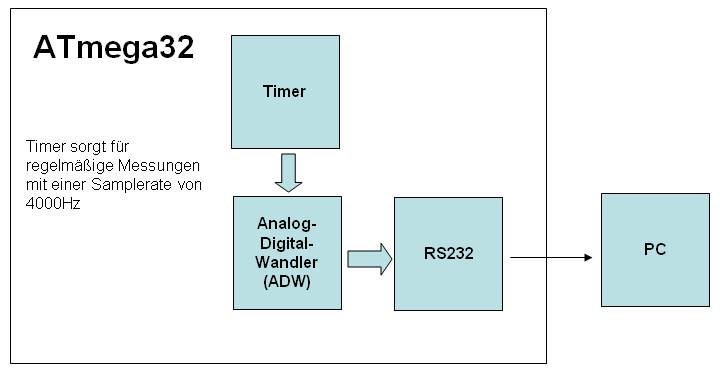
Bild 0-1: Komplexes Zusammenspiel mehrerer Komponenten auf dem ATmega32.
- Wenn der gesamte Code im main-Programm, oder auch wenn er auf globale Funktionen verteilt steht, ist es sehr schwierig:
- Fehler einzelner Komponenten zu finden,
- einzelner Komponenten umzukonfigurieren,
- jemandem den Code zu erklären,
- die Einzelkomponenten herauszuschälen und in einem anderen Programm zu benutzen,
- mit mehreren Personen an einem größeren Projekt zu arbeiten und Teilaufgaben zu vergeben,
- eine große Aufgabe in mehrere Bachelor-Arbeiten zu zerlegen und den Stand der vorangehenden Arbeit weiterzugeben ;-).
|
- Es ist mir ein großes Anliegen mit dieser Vorlesung ein tragfähiges objektorientiertes Basiskonzept für die Programmierung von AVR-Mikrocontrollern auf den Weg zu bringen, auf das immer wieder zurück gegriffen werden kann.
|