Beispiel: Fußgängerampel
|

Bild 0-1: Fertig aufgebaute Ampelschaltung
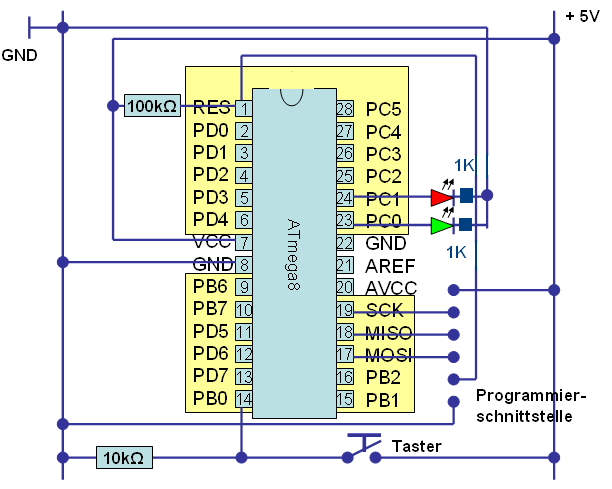
Bild 0-2: Schaltplan der Ampelschaltung

Bild 0-3: LED Anschlüsse
#include <avr/io.h>
int main(void)
{
unsigned char akku;
int i,k;
//PORT B als Eingang, um Testschalter zu realisieren:
DDRB = 0x00;
//PORT C als Ausgang:
DDRC = 0xff;
while(1)
{
akku = PINB;
if( (akku & 0b00000001) > 0 )
{
PORTC = 0b00000001; //gruen
for(i=0;i<1000;i++) //Pause
{
for(k=0;k<100;k++)
{
}
}
}
else
{
PORTC = 0b00000010; //rot
}
}
}
Code 0-1: Ampelprogramm

Bild 0-4: Programm Dokumentation
Variationsideen
Im Workshop wird das Ampelbeispiel erläutert und als Steckbrett-Schaltung zur Verfügung gestellt. Um es wirklich zu verstehen, bietet es sich an, Varianten zu programmieren und zu bauen und diese zu testen:
|
 Fußgängerampel als AVR-Studio-Projekt
Fußgängerampel als AVR-Studio-Projekt