Prinzip - Was ist ein PWM-Signal?
- Neben der Möglichkeit Sensorsignale über den A/D-Wandler oder den Komparator auszuwerten, gibt es bei dem ATmega32 als integrierte Peripherie auch eine zur Ansteuerung von Aktuatoren:
- Die drei integrierten Timer sind in der Lage so genannte Pulsweiten modulierter Signale, kurz PWM-Signale zu erzeugen.
- PWM-Signale sind Rechteckschwingungen einer festen Frequenz.
- Dasjenige, was in dem von uns betrachteten Fall schwingt, ist die elektrische Spannung.
- D.h. die Dauer einer Periode bestehend aus einer High-Phase und einer Low-Phase ist konstant.
- Jedoch kann variiert werden, in welchem Maße die High-Phase verbreitert wird. In gleichem Maße muß dann die Low-Phase schmaler werden.
- Im Extremfall kann die High-Phase über die gesamte Periodendauer gehen, oder im anderen Extremfall die Lowphase.
- Folgendes Schaubild zeigt:
- a) PWM-Signal, bei dem High- und Lowphase jeweils 50% der Periode ausmachen.
- b) PWM-Signal, bei dem die Highphase 25% und die Lowphase 75% ausmacht.
- c) PWM-Signal, bei dem die Highphase 75% und die Lowphase 25% ausmacht.
- d) PWM-Signal, bei dem die Highphase 0% und die Lowphase 100% ausmacht.
- e) PWM-Signal, bei dem die Highphase 100% und die Lowphase 0% ausmacht.
|
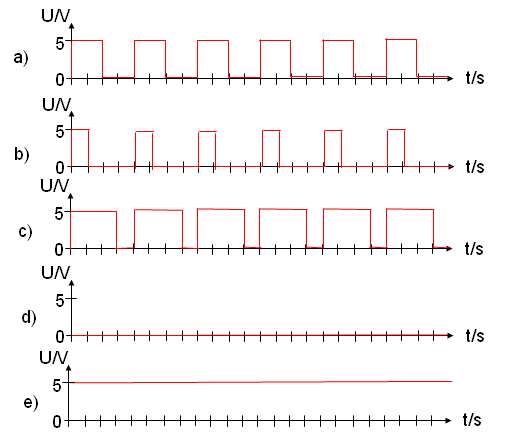
Bild 0-1: Beipsiele für PWM-Signale