Testanordnung
- In einem ersten Test soll die full-duplex-Eigenschaft gleich demonstriert werden.
- Es werden drei Testboards miteinander über die SPI-Schnittstelle verbunden.
- Dabei ist darauf zu achten, dass neben den Leitungen MISO, MOSI, SCK und den Slave Select-Leitungen in jedem Fall die Masse aller Testboards miteinander verbunden ist, um die logischen Pegel auf einen Level zu bringen.
- Auf dem Foto unten ist zu sehen, dass die Anschlüsse MOSI, MISO, SCK, die sonst zum Programmierstecker gehören, bei allen drei Boards über eine Leitung mit drei Adern miteinander verbunden wurden.
- Das linke Testboard ist der Master.
- Es sei noch einmal darauf hingewiesen, dass MOSI des Masters mit den beiden MOSI-Pins der Slaves, MISO ds Masters mit den beiden MISO-Pins der Slaves und auch SCK des masters mit den beiden SCK-Pins der Slaves verbunden wurde und nicht etwa über Kreuz.
- Von der roten Ader ausgehend, ist die Reihenfolge MOSI, MISO, SCK.
- Als Slave-Select Pins werden beim Master PA1 für die Anwahl von Slave 1 (mittleres Board) und PA2 für die Anwahl von Slave 2 (rechts Board) gewählt.
- Wie bei den vorhergehenden Versuchen, werden die hier im Bild jeweils rechts zu sehenden Mikrocontroller auf den Boards miteinander verbunden, während die jeweils linken (jeweils Projekt mueca) bei den Sieben Segment-Anzeigen dazu da sind, das, was von den rechten Mikrocontrollern (jeweils Projekt muecb) auf Port C ausgegeben wird als Dezimalzahl anzuzeigen.
|
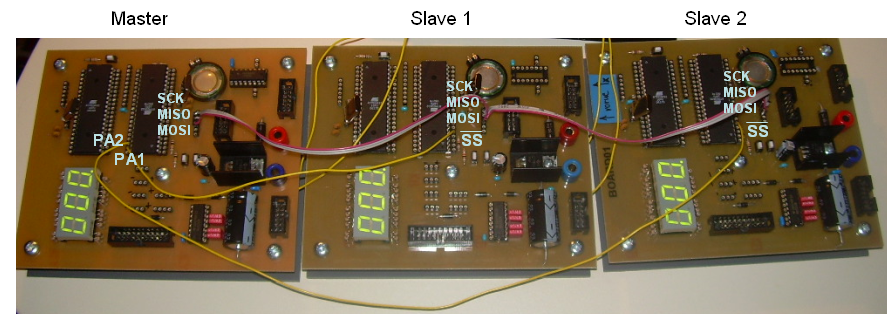
Bild 0-1: Verschaltung dreier Testboards über die SPI-Schnittstelle.