|
Bussysteme
Was ist ein Bussystem?
- Beim UART handelt es sich um das erste Beispiel eines Bussystems.
- Das Wort Bussystem ist aus dem lateinischen Wort "Omnibus" abgeleitet uns heißt "für alle"
- Ein Bussystem dient dazu Daten zwischen mehreren Computern, oder auch zwischen einer CPU und ihrer Peripherie auszutauschen.
- Ein Bussystem besteht aus einer vordefinierten Anzahl von Leitungen, über die mehrere Komponenten miteinander verbunden sind.
- Jede Komponente muß über ein passendes Stück Soft- und/oder Hardware verfügen, um über die Busleitungen Daten senden oder empfangen zu können.
- Es gibt Bussysteme, deren Datenleitungen im Zentimeterbereich liegen müssen und die Daten zwischen mehreren Prozessoren oder Peripheriegeräten transferieren, z.B. der I2C-Bus.
- Es gibt aber auch Bussysteme, deren Datenleitungen über mehrere Kilometer Leitung transportieren können und die zur Kommunikation zwischen mehreren Geräten dienen, so genannte Feldbus-Systeme, z.B. der CAN-Bus.
- Bei Zusammenschluß mehrerer Komponenten, zapft jede Komponente die Busleitungen ab (Bus-Topologie):
- Die Busleitungen besitzen in der Regel Abschlußwiderstände, um Reflexionen der Pegel an den Leitungsenden zu vermeiden.
|
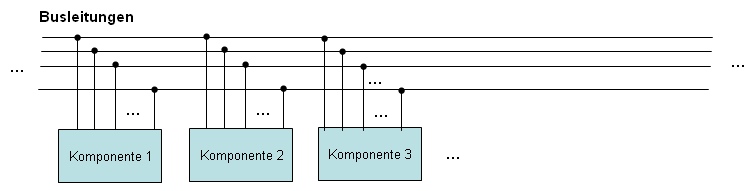
Bild 0-1: Bussystem
- Die Art und Weise, wie die Abfolge der Low- und Highpegel bei den Komponenten abläuft, um Daten über den Bus zu schicken, nennt man Busprotokoll
- Im Busprotokoll jedes Bussystems sind Strategien eingearbeitet, wie Kollisionen zwischen mehreren sendenden Komponenten vermieden werden können und wie die Komponenten synchronisiert werden können, damit eine Komponente die seriell durch den Bus geschickten Daten empfangen kann.
- Allgemein kann man sagen: Je mehr Leitungen das Bussystem hat, desto einfacher das Protokoll und desto schneller die Datenübertragung.
- Hat man viele Leitungen, so kenn eine z.B. dazu dienen, eine Rechteck-Schwingung zur Synchronisation zu führen.
- Weitere Leitungen können als Wahlleitungen dienen, um den Empfänger einer seriell gesendeten Nachricht festzulegen.
- Gibt es diese Leitungen nicht, so müssen diese Dinge über ein aufwändigeres Busprotokoll, das mit weniger Leitungen arbeitet realisiert werden.
|
|