|
Entwicklungsgeschichtliches
- Wie es zu der heutigen Gestalt der Computer mit Daten- und Programmbus gekommen ist.
- Jeder heutige Computer, der mit einer CPU, einer "Central Process Unit" arbeitet, entspricht dem Grundtyp des Computers schlechthin, er entspricht der nach Alan Mathison Turing (1912-1954) benannten "Turingmaschine":
|
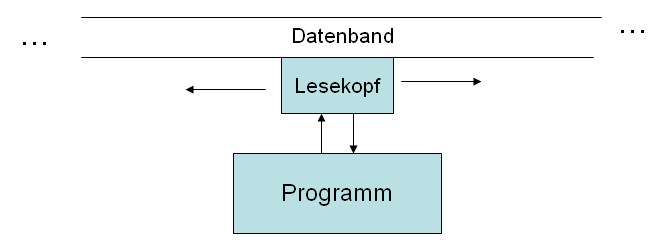
Bild 0-1: Turingmaschine
- Turings Grundfrage war: Wie kann die Grundstruktur einer Maschine aussehen, die dazu in der Lage sein soll, jede Art von mathematischem Problem zu lösen.
- Bei dem von Turing 1936 angegebenen Modell solch einer Maschine, gibt es ein endloses Band mit Dateneinträgen, entlang dessen der Lese- und Schreibkopf einer Maschine wandern kann.
- Nur an der Stelle, wo sich gerade der Lesekopf befindet, kann sie ein Datenelement lesen oder schreiben.
- Er konnte nachweisen, dass sich mit dieser Maschine Summationen, Subtraktionen und Multiplikationen bewältigen lassen und sich mit darauf aufbauenden komplexeren Programmen, beliebige methematische Probleme lösen lassen.
|
- Zwischen den 1955 und 1965, als die ersten Großrechner entstanden, arbeitete man in etwas euphorischer Überstrapazierung der Turing-Maschine an einem Konzept für einen GPS, einen "Global Problem Solver".
- Seit den 70er Jahren hat man Abstand von diesem Anspruch genommen.
- Statt dessen ist man dazu übergegangen, Hardware und Software an die Erfordernisse zur Lösung ganz spezieller Probleme anzupassen.
- Ein Ergebnis der sich daraus ergebenden starken Diversifizierung der Soft- und Hardware-Entwicklung, ist der Mikrocontroller.
- Während bei der Entwicklung des PCs eine größtmögliche Flexibilität in den Einsatzgebieten und eine großzügige Benutzerschnittstelle im Fordergrund steht, ist der Mikrocontroller auf Miniaturisierung zum Zwecke der Integration in beliebige Geräte angelegt.
- Sowohl beim PC, als auch beim Mikrocontroller läßt sich noch leicht die Verwandschaft zur Turingmaschine erkennnen:
|
|