Maschinensprache
- was sich durch die Basisarchitektur heutiger Computer für eine Grundgestalt bei der Programmierung auf Maschinenebene ergibt
Grundarchitektur Mikrocontroller / PC im Vergleich
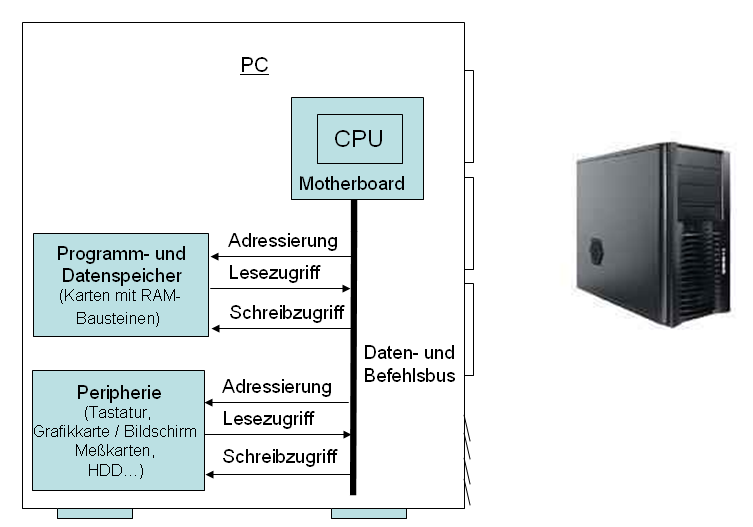
Bild 0-1: PC-Architektur (von Neumann-Architektur)

Bild 0-2: Mikrocontroller-Architektur (Harvard-Architektur)
- Die vorangehenden Bilder vergleichen die Architektur eines PCs mit der eines Mikrocontrollers.
- Bedenken Sie: Bei "PC" ist alles gemeint, was beispielsweise in ein Tower-Gehäuse eingebaut wird: Das Motherboard mit der darauf sitzenden CPU (z.B. PenthiumIV oder Athlon-Prozessor) und die eingesteckten Karten.
- Dagegen ist mit "Mikrocontroller" nur das IC, z.B. der abgebildete ATmega32 gemeint.
- Stellen Sie sich zunächst ein "Bussystem" als einen Strang paralleler Leitungen vor, der an verschiedenen Stellen von verschiedenen Komponenten angezapft wird.
- Dabei gibt es Master-Komponenten, die bestimmen, was auf dem Bussystem passiert, hier ist das die CPU und Slave-Komponenten, die auf Anfragen auf dem Bussystem reagieren.
- Bussysteme unterscheiden sich nach Anzahl der Leitungen, der möglichen Übertragungsgeschwindigkeit und dem so genannten Bus-Protokoll, das die Struktur und den zeitlichen Ablauf der auf das Bussystem geschickten Datenpakete beschreibt und wie Kollisionen zwischen lauschenden und sendenden Komponenten vermieden wird.
- Statt eines Datenbands wie bei der Turingmaschine, gibt es also beim PC und beim Mikrocontroller ein- bzw. zwei Bussysteme mit angeschlossenem Daten- und Programmspeicher.
- Nach Neustart des Mikrocontrollers wird aus dem Programmspeicher Befehl für Befehl geladen und abgearbeitet.
|
Was ist Maschinensprache?
- Mikrocontroller haben kein Betriebssystem.
- Werden sie eingeschaltet, oder wird ein Reset durchgeführt, so springt der Programmzähler in der Regel an den Anfang des Programmspeichers und holt von da den ersten Maschinenbefehl in die CPU.
- Ein solcher Befehl ist nichts anderes als eine Zahl, die beim ATmega32 zwischen 0 und 63 liegt, also mit 6-Bit dargestellt werden kann.
- Diese Zahl wird dann von der CPU interpretiert.
- Je nach Befehlscode, folgen ihm weitere Bit-Codierte Parameter.
|