Modellierung des mechanischen Teilmodells
- Die Gleichungen des mechanischen Teils des Modells, kann mit Hilfe der Newton-Eulerschen Gleichungen gewonnen werden.
- Die Modellierungstiefe soll in unserem Beispiel recht gering sein.
- D.h. es wird Gebrauch von einer ganzen Reihe an Vereinfachungen gemacht, die aber zur Behandlung der hier untersuchten Fragestellungen legitim sind.
- Die Modellierung erfolgt in der Ebene, da hier nur die Geradeaus-Fahrt betrachtet wird.
- Rumpf und Radachse werden als Quader und Walze modelliert, da in den Modellgleichungen jeder Körper lediglich durch die drei Parameter Masse, Schwerpunktlage und Hauptträgheitsmoment bestimmt ist.
- Es wird davon ausgegangen, dass bei dem behandelten Anwendungsfall kein, oder ein vernachlässigbarer Radschlupf entsteht.
- Dadurch erhält man einen eindeutigen Zusammenhang zwischen Radwinkel und Radposition.
|
- Die Verdrehwinkel von Rad und Rumpf bezüglich des feststehenden Koordinatensystems beschreiben eindeutig die Lage des Einachsers.
- Aufgrund der Zwangsbedingungen liegen dann die Koordinaten der Schwerpunkte beider Körper fest.
- Die Zwangsbedingungen sind also die Schwerpunktkoordinaten dargestellt in Abhängigkeit zu dem Verdrehwinkel des jeweiligen Körpers und sehen folgendermassen aus:
|

Bild 0-1: Zwangsbedingungen beim mechanischen Teilmodell des Einachsers
- Durch Freischneiden der Körper wird deutlich, dass im Verbindungsgelenk zwischen Rad und Rumpf und an der Berührstelle des Rades am Boden Zwangskräfte auftreten.
- Die Zwangskräfte verursachen auch bezüglich der Körperschwerpunkte Momente.
- . Hinzu kommt das Antriebsmoment M.
- Desweiteren wirken die Gewichtskräfte im Schwerpunkt des jeweiligen Körpers.
- Die beiden Körper haben die Möglichkeit sich translatorisch jeweils in zwei Richtungen zu bewegen.
- Die Newton-Gleichungen liefern deshalb für jeden Körper zwei Gleichungen:
- Jeder der Körper hat ausserdem die Möglichkeit sich in der X/Y-Ebene um die Z-Achse zu drehen.
- Deshalb ergibt sich aus den Euler-Gleichungen je eine Gleichung pro Körper.
|

Bild 0-2: Newton-Euler-Gleichungen für den Einachser
- Wenn man als Vorbereitung für die numerische Integration der Gleichungen die Geschwindigkeiten substituiert, erhält man statt 6 DGLs zweiter Ordnung, 12 erster Ordnung.
|

Bild 0-3: Newton-Euler-Gleichungen als Simulationsgleichungen
Zustandsgrößen
- Die insgesamt zwölf Größen bestehnd aus Winkeln und Schwerpunktskoordinaten und deren erste Ableitungen werden Zustandsgrößen genannt. Sie repräsentieren den Zustand des dynamischen mechanischen Systems zu einem bestimmten Zeitpunkt.
|
Anfangsbedingungen
- Neben den ganzen Parametern, wie Massen, Trägheitsmomente, Lage der Gelenke und Schwerpunkte, benötigt man zur Integration auch immer Anfangsbedingungen.
- Jede der 12 Gleichung benötigt eine. Man benötigt also die Koordinaten, die Winkel und deren jeweilige Ableitungen, also Geschwindigkeit und Winkelgeschwindigkeiten, als Startpunkt für die Integration.
- . Mit Hilfe der Zwangsbedingungen können aus den bekannten Winkeln die Koordinaten der Körper bestimmt werden. Durch einmalige Ableitung der Zwangsbedingungen ergeben sich auch die Geschwindigkeiten.
|
Berechnung der Zwangskräfte
- Was auch noch fehlt, um die Integration durchführen zu können, sind die Zwangskräfte. Für diese lässt sich aber ein Gleichungssystem aufstellen, das nur die zu einem Zeitpunkt bekannten Zustandsgrößen enthält.
- Das Gleichungssystem für die vier Zwangskräfte kann aus den vier Newton-Gleichungen gewonnen werden:
|

Bild 0-4: Zwangskräfte aus Newton-Gleichungen
- Man leitet zunächst die Zwangsbedingungen zum zweiten mal ab und setzt deren rechte Seite für x, bzw. y Zweipunkt in die Newton-Gleichungen ein.
|
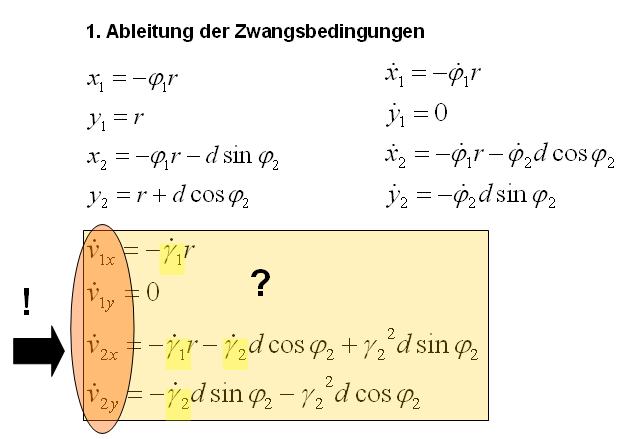
Bild 0-5: Zwangsbedingungen
- Dann löst man noch die Eulergleichungen nach den zweiten Ableitungen der Winkel auf und setzt auch diese rechten Seiten für die zweiten Ableitungen in den umgeformten Newton-Gleichungen ein.
|

Bild 0-6: Eulergleichungen eingesetzt.
- Damit hat man alle zweiten Ableitungen der Zustandsgrößen eliminiert und erhält ein Gleichungessystem mit vier Unbekannten und vier Gleichungen, das die Zwangskräfte liefert.
|

Bild 0-7: LGS für Zwangskräfte
- Bei der numerischen Integration, also bei der Simulation, werden nun vor jedem Integrations-Schritt die Zwangskräfte berechnet und in die Simulationsgleichungen eingesetzt.
|

Bild 0-8: Gesamtschema für die Simulation.