LV 16.06.2024 Grundlagen der Mikrocontrollertechnik 4EIT 4EMO 4MT im Sommersemester 2023
(EN google-translate)
(PL google-translate)
NEU Sommersemester 2024, LV #7, 16.06.2024 OOP / Bussysteme
Themen
|
1. OOP
|
 Einführung zu OOP mit dem Mikrocontroller: 40_Mikrocontroller/08_OOP
Einführung zu OOP mit dem Mikrocontroller: 40_Mikrocontroller/08_OOP
Im Unterricht entwickelte aufeinander aufbauende Beispiele
 OOPneu001.zip -- direkt blinkende LED im Hauptprogramm mittels Arduino Befehlen.
OOPneu002.zip -- direkt blinkende LED im Hauptprogramm mittels Register Befehlen.
OOPneu003.zip -- Funktionen.
OOPneu004.zip -- Klasse LED (OOP).
OOPneu005.zip -- Klasse LED (OOP) mit Konstruktor.
OOPneu001.zip -- direkt blinkende LED im Hauptprogramm mittels Arduino Befehlen.
OOPneu002.zip -- direkt blinkende LED im Hauptprogramm mittels Register Befehlen.
OOPneu003.zip -- Funktionen.
OOPneu004.zip -- Klasse LED (OOP).
OOPneu005.zip -- Klasse LED (OOP) mit Konstruktor.
2. Bussysteme
40_Mikrocontroller/06_UART/01_Bussysteme
3. Serielle Schnittstelle
40_Mikrocontroller/06_UART/02_UART
40_Mikrocontroller/06_UART/03_RS232
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.write("Hallo\n");
delay(500);
}
Code 0-1: erstes Beispiel zur seriellen Schnittstelle
ÜBUNG: Möglichkeit Objekt LED so zu konfigurieren, dass eine von 4 LEDs verwendet wird.
class LED
{
private:
int pin;
int PDX;
public:
LED(int num)
{
pin = num;
if (num == 1) {
PDX = PD7;
}
if (num == 2) {
PDX = PD4;
}
if (num == 3) {
PDX = PD0;
}
if (num == 4) {
PDX = PD1;
}
DDRD |= (1 << PDX);
};
void on()
{
PORTD |= (1 << PDX);
}
void off()
{
PORTD &= ~(1 << PDX);
}
};
LED john(1); // (Pin 6)
LED steven(2); // (Pin 4)
LED ryan(3); // (Pin 3)
LED chris(4); // (Pin 2)
void setup()
{
}
void loop()
{
john.on();
delay(200);
steven.on();
delay(200);
ryan.on();
delay(200);
chris.on();
delay(200);
john.off();
steven.off();
ryan.off();
chris.off();
delay(200);
}
Code 0-2: Studentische Lösung.
ENDE NEU Sommersemester 2024, LV #7, 16.06.2024 OOP / Bussysteme
Thema: Objektorientierte Programmierung (OOP) in C++ auf Mikrocontrollern
Als Beispiele sollen die beiden Komponenten Servo und 4fach 7-Segment-Anzeige in eine Klasse überführt werden.
Vorteile der OOP und gleichzeitig Paradigmen:
|
Einführung zu OOP mit dem Mikrocontroller: 40_Mikrocontroller/08_OOP
Im Unterricht entstandene Programme als Grundlage für die Übung:
OOPled001.zip
OOPled002.zip
OOPled003.zip
OOPled004.zip
OOPled005.zip
OOPled006konstruktor.zip
OOPled007servo.zip
#6 Fr 05.05.2023
Themen
|
1. Timer als Zähler verwenden
|
Beispielprogramm, bei denen ein Timer als Zähler arbeitet:
Analyse von Code 0-1: "Walfischgesänge" bei 96_Arduino/22_Universal/08_Lautsprecher
Analysieren Sie insbesondere Mode 4 im Datenblatt.
2. Entwicklung der Software für das Anzeigedisplay
Methode: Herunterbrechen einer komplexen Aufgabe in aufeinander aufbauenden Teilaufgaben, die alle für sich funktionieren.
Exkurs: Agile Projektmanagementmethode Scrum:
67_Echtzeitsysteme/13_Fuzzy/05_Softwareentwicklung/01_AgileSoftwareentwicklung
Aufeinander aufbauende Teillösungen:
|
Katoden (-): A - PB0 B - PB1 C - PB2 D - PB3 E - PB4 F - PB6 G - PB7 PB5 : SERVO Anoden (+): Ditit1 - DIO 2 Ditit2 - DIO 3 Ditit3 - DIO 4
Code 0-3: Ditit4 - DIO 5
Jede Teillösung wird als eigenes Projekt gestestet und bewahrt.
anzeige003.zip
anzeige004.zip
anzeige005.zip
Nach erfolgreichem Test einer Teillösung, wird das Arduino-Projekt als Kopie unter dem Namen des Nachfolgeprojektes gespeichert und dort die weiter gehende Funktionalität ergänzt.
3. Übung: Uhr programmieren
|
#7 Fr 12.05.2023
Themen
|
Ergänzungen zu Timern
Analyse weiterer Modi neben ISR, um einen festen Takt zu bekommen. 1. Methode: Zähler auslesen, 2. Methode: Direkt Rechtecksignal erzeugen.
Methode 1: 1 Hz Blinken über CTC-Mode des Zählers 1. Zählstand wird ständig geprüft.
|
void setup()
{
ICR1 = 62500-1; // Siehe Datenblatt Seite 123
TCNT1=0; //Zählregister von Timer 1
// WGM13...WGM10 = 1100 => Mode 12 == CTC, mit ICR1 als TOP, siehe Datenblatt zu Atmega32u4, Seite 133.
// CS12..CS10 = 100 => Vorteilung 256 => Zählen läuft mit 62500Hz, Seite 134.
// COM1A1,COM1A0 = 00, COM1B1,COM1B0 = 00 => "normal Port-Operation" (Keine Signale herausschicken), Seite 132.
TCCR1A = (0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<COM1C1) | (0<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (1<<WGM12) | (1<<CS12) | (0<<CS11) | (0<<CS10);
// PB7 == DIO 11, vergl. kramann.info LED-Leiste
DDRB |= (1<<PB7);
PORTB &= ~(1<<PB7); //LED aus
}
// 1Hz Blinken
void loop()
{
if(TCNT1<31250) //Bei der unteren Hälfte des Zählvorgangs aus.
PORTB &= ~(1<<PB7); //LED aus
else
PORTB |= (1<<PB7); //LED an
}
Code 0-4: 1 Hz Blinken über CTC-Mode des Zählers 1. Zählstand wird ständig geprüft.
Methode 2: 1 Hz Blinken über CTC-Mode mit Ausgangssignal.
siehe auch:
96_Arduino
void setup()
{
ICR1 = 62500/2-1; // Siehe Datenblatt Seite 123
TCNT1=0; //Zählregister von Timer 1
// WGM13...WGM10 = 1100 => Mode 12 == CTC, mit ICR1 als TOP, siehe Datenblatt zu Atmega32u4, Seite 133.
// CS12..CS10 = 100 => Vorteilung 256 => Zählen läuft mit 62500Hz, Seite 134.
// COM1A1,COM1A0 = 01, COM1B1,COM1B0 = 01 => "Toggle OCnA/OCnB/OCnC on compare match", Seite 131.
// Frequenz, siehe: S.123.
TCCR1A = (0<<COM1A1) | (1<<COM1A0) | (0<<COM1B1) | (1<<COM1B0) | (0<<COM1C1) | (1<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (1<<WGM12) | (1<<CS12) | (0<<CS11) | (0<<CS10);
// OCR1A ist auf Digital Pin 9 == PB5, vergl. kramann.info, Arduino.
// OCR1B ist auf Digital Pin 10 == PB6, vergl. kramann.info, Arduino.
DDRB |= (1<<PB5) | (1<<PB6);
//pinMode(9,OUTPUT);
//pinMode(10,OUTPUT);
}
void loop()
{
}
Code 0-5: 1Hz über fest konfiguriertes Toggeln auf Pin9 und 10, kein Code in loop() nötig!
Behandlung von Bussystemen
Themen:
|
1. Überblick zu Bussystemen
40_Mikrocontroller/06_UART/01_Bussysteme
2. Einführung zu UART (serielle Schnittstelle) mit RS232-Protokoll
40_Mikrocontroller/06_UART/02_UART
40_Mikrocontroller/06_UART/03_RS232
3. Verwendung der seriellen Schnittstelle mittels der Arduino-Library
Typischerweise wird ein externes Gerät seriell an die Hauptplatine angebunden. Dies soll hier prinzipiell demonstriert werden, indem zwei Arduino seriell über Kreuz miteinander verbunden werden:
RXD____ ____TXD
Arduino 1 \/ Arduino 2
/\
TXD---- ----TXD
GND----------GND
Code 0-6: Verbindung zweier Arduino über Kreuz.
Warum ist die GND-Verbindung notwendig?
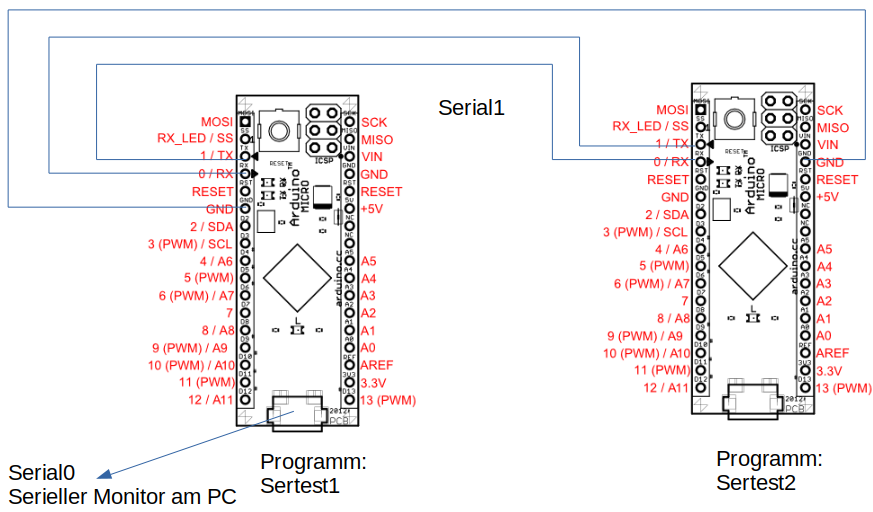
Bild 0-1: Aufbau mit zwei Arduino-Micro. Vom ersten wird der serielle Monitor am PC geöffnet.
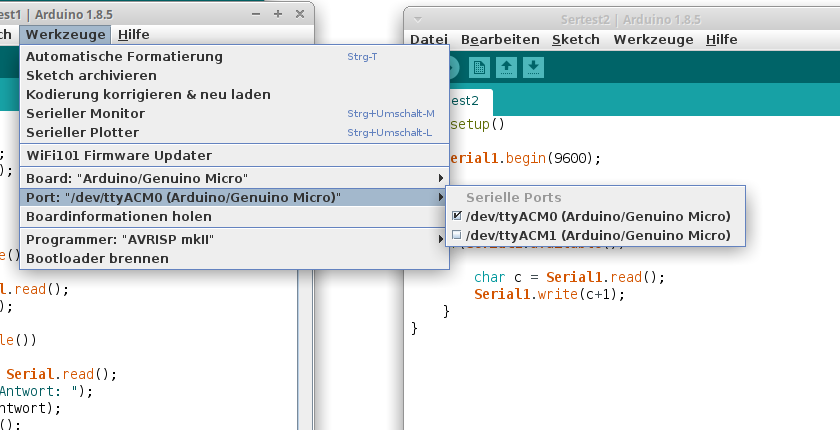
Bild 0-2: Zwei Arduino Micro werden nun von der Arduino IDE erkannt.

Bild 0-3: Aufbau der Testschaltung.

Bild 0-4: Kommunikation auf dem seriellen Monitor.
void setup()
{
Serial.begin(9600);
Serial1.begin(9600);
}
void loop()
{
if(Serial.available())
{
char c = Serial.read();
Serial1.write(c);
}
if(Serial1.available())
{
char antwort = Serial1.read();
Serial.print("Antwort: ");
Serial.write(antwort);
Serial.println();
}
}
Code 0-7: Sertest1 für Arduino ttyACM0, wo später der serielle Monitor geöffnet wird.
void setup()
{
Serial1.begin(9600);
}
void loop()
{
if(Serial1.available())
{
char c = Serial1.read();
Serial1.write(c+1);
}
}
Code 0-8: Sertest2 für Arduino ttyACM1
4. Verwendung der seriellen Schnittstelle mittels Registerkonfiguration
Sertest2 soll nun mittels Registerbefehlen funktionieren und als Sertest2reg gespeichert werden:
Laut Pinbelegung des Chips sind die herausgeführten seriellen Pins RXD1 und TXD1
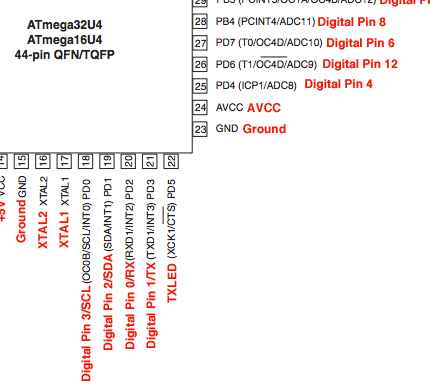
Bild 0-5: Chip ATmega32u4.
Notwendige Registerkonfigurationen, vergl. Datenblatt ab Seite 111.
#include<avr/io.h>
#define TAKTFREQUENZ 16000000
#define BAUDRATE 9600
void setup()
{
//Serial1.begin(9600);
//Merken des in UBRR zu speichernden Wertes.
//Examples of Baud Rate Setting, Seite 206
//Seite 191 Datenblatt
//Seite 213 Datenblatt
// unsigned int baudregister = (TAKTFREQUENZ/(16*BAUDRATE))-1;
unsigned int baudregister = (1000000/BAUDRATE)-1;
//setzen der Baudrate
//UBRRH1 = (unsigned char) (baudregister>>8); //Setzen des HIGH-Bytes des Baudraten-Registers
//UBRRL1 = (unsigned char) baudregister; //Setzen des LOW -Bytes des Baudraten-Registers
UBRR1 = baudregister;
//Einschalten des Senders und des Empfängers
//Seite 190 Datenblatt
UCSR1B = (1<<TXEN1) | (1<<RXEN1) | (0<<UCSZ12);
//Setzen des Nachrichtenformats: 8 Datenbits, 1 Stopbits
// USBS1 == 0 == 1 stop bit
// UCSZ12 UCSZ11 UCSZ10 == 0 1 1 == 8 Datenbit
//Seite 212 Datenblatt
UCSR1C = (1<<UCSZ11) | (1<<UCSZ10) | (0<<USBS1);
}
void loop()
{
while( !(UCSR1A & (1<<RXC1)) ) DDRB|=0; //Warten bis der Uebertragungspuffer ein Zeichen empfangen hat
int c = UDR1;
//Serial1.write(c+1);
while( !(UCSR1A & (1<<UDRE1)) ) DDRB|=0; //Warten bis der Uebertragungspuffer leer ist
UDR1 = c+1;
}
Code 0-9: Sertest2reg
5. Objektorientierte Kapselung der seriellen Schnittstelle
(Saal-) ÜBUNG
|
6. Auslesen eines MPU6050 über die I2C-Schnittstelle mittels Library
Der MPU6050 vereinigt einen dreiachsigen Beschleunigungssensor und einen dreiachsiges Gyroskopsensor. Er findet Anwendung in mobilen Devices, steht aber auch für die Verwendung mit Arduino auf kleinen Zusatzplatinen zur Verfügung. Er kann über den I2C-Bus angesprochen und ausgelesen werden.
MPU6050 ---- Arduino VCC ---- 3.3V GND ---- GND SCL ---- SCL SDA ---- SDA
Code 0-10: Verbindung MPU6050 mit Arduino
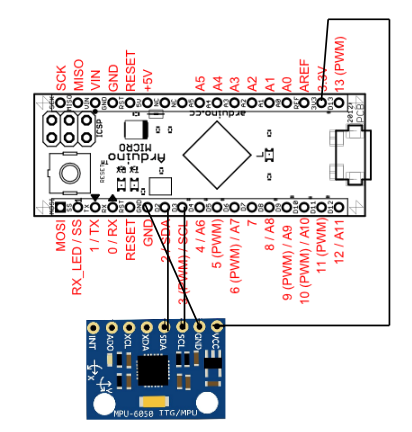
Bild 0-6: Schematischer Versuchsaufbau zum Testen des MPU6050.
Neben einem dreiachsigen Beschleunigungssensor und einem Gyriskop besitzt der MPU6050 auch einen Temperaturfühler, der sich so kalibrieren läßt, dass die Werde gleich in Grad Celsius zur Verfügung stehen.
Die Abfrage dieser Temperaturwerte ist nicht ganz einfach, da sie über ein Bussystem (SPI-Bus) erfolgt. Es gibt bestimmte Befehlsfolgen, die den Baustein konfigurieren und in setup() stehen und andere, die die Daten abfragen.
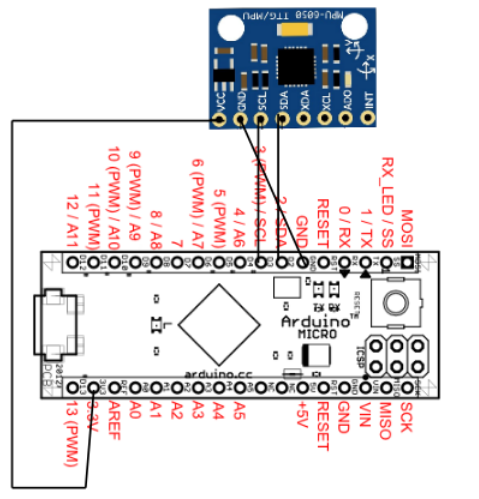
Bild 0-7: Schaltplan zur Verbindung des MPU6050 mit dem Arduino Micro (LED-Teil wurde hier weggelassen).
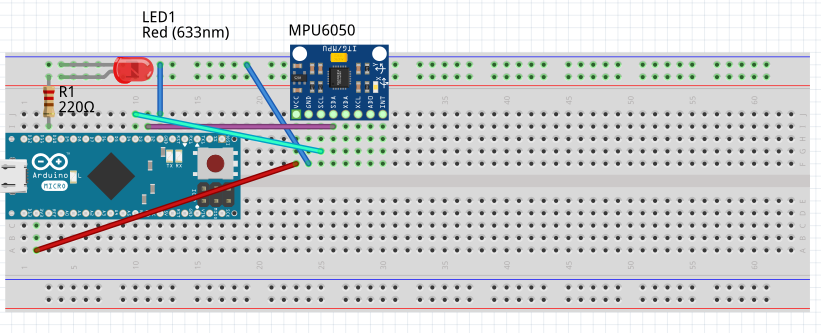
Bild 0-8: Darstellung des Aufbaus auf dem Steckboard.
#include<math.h>
#include<Wire.h>
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX=0,AcY=0,AcZ=0,Tmp=0,GyX=0,GyY=0,GyZ=0;
double TEMPERATUR = 0.0;
void setup()
{
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
delay(500);
}
void loop()
{
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
TEMPERATUR = Tmp/340.00+36.53;
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(TEMPERATUR); //equation for temperature in degrees C from datasheet
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.print(GyZ);
delay(500);
}
Code 0-11: Testprogramm, um alle Sensordaten, die der MPU6050 liefert im Serial Monitor ansehen zu können.
TemperaturAbfrage.zip -- Sketch mit obigem Testprogramm als .zip-File -- Sie können das .zip-File herunterladen und in Ihren Sketch-Ordner legen (Name Arduino). Nach einem Neustart der IDE erscheint auch dieser Sketch im Sketchbook.
Aufgaben
|
(Saal-) ÜBUNG
Emulieren Sie in folgender einfacher Weise eine serielle Schnittstelle mit Hilfe eines gewöhnlichen digitalen Ausgangs:
Die Hardwareanordnung entspricht der von oben bei Sertest1 und Sertest2. Die Aufeinanderfolge von Low und High-Pegeln soll auf dem gleichen digitalen Ausgang für den zweiten Mikrocontroller so erfolgen, dass dadurch seriell mit einem Start-Bit und acht Datenbits zyklisch der Buchstabe "A" an den ersten Mikrocontroller gesendet wird. Nutzen Sie den Timer 1 im CTC-Mode, um die Dauer der Low- und Highpegel zu steuern.