LV 02.05.2024 Grundlagen der Mikrocontrollertechnik 4EIT 4EMO 4MT im Sommersemester 2023
(EN google-translate)
(PL google-translate)
NEU ergänzt im Sommersemester 2024, LV #5, 25.04.2024 FOLGT DER ALTEN EINFÜHRUNG ZU PWM: 2. Quiz, 3. ROBOSUMO usw. PLUS:
|
int z=0;
int u=0;
void setup()
{
pinMode(13, OUTPUT);
}
void loop()
{
if (z<=((u/1000)%2)){
digitalWrite(13, HIGH);
}
else{
digitalWrite(13, LOW);
}
delay(1);
z++;
z%=20;
u++;
}
Code 0-1: Ü1: Nur Mit Hilfe eines delay(1) und einem normalen digitalen Ausgang einen Servo ansteuern. (Springt zwischen +/-45Grad hin und her)
ENDE NEU ergänzt im Sommersemester 2024, LV #5, 25.04.2024:
Themen
|
1. Prinzip der Generierung von PWM-Signalen bei Mikrocontrollern
 40_Mikrocontroller/04_PWM/03_Generierung
40_Mikrocontroller/04_PWM/03_Generierung
2. Gemeinsame Analyse einer Servo-Ansteuerung via PWM über Register-Konfigurationen
 Datenblatt zum ATmega32u4 -- https://ww1.microchip.com/downloads/en/devicedoc/atmel-7766-8-bit-avr-atmega16u4-32u4_datasheet.pdf
Datenblatt zum ATmega32u4 -- https://ww1.microchip.com/downloads/en/devicedoc/atmel-7766-8-bit-avr-atmega16u4-32u4_datasheet.pdf
#define WMIN 1000
#define WMITTE 1500
#define WMAX 2000
#define SCHRITTE 1000
//Mode 8
//Phasen- und Frequenz-korrekt
//WGM1 3 2 1 0
// 1 0 0 0
//ICR1=..... TOP
//fpwm = fclk/(2*N*TOP)
//Vorteilung
//N=8
//80Hz = 16000000/(2*8*TOP)
//TOP = 16000000/(2*8*80Hz)=12500
//dt==1000ms*(1/80Hz)/12500 == 0,001ms (1 Schritt == 0,001ms)
//=>
//1ms == 1000 Schritte
//1,5ms == 1500 Schritte
//2ms == 2000 Schritte
void setup()
{
TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0)
| (0<<COM1C1) | (0<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (0<<CS10); //Vort. 8, s.S. 135
ICR1=12500;
DDRB |= (1<<PB5); //OCR1A
DDRB |= (1<<PB6); //OCR1B
OCR1A = WMITTE; //PWM-Breite auf Mitte setzen.
OCR1B = WMITTE; //PWM-Breite auf Mitte setzen.
}
void loop()
{
OCR1A = WMAX; //PWM-Breite auf Null setzen.
OCR1B = WMAX; //PWM-Breite auf Null setzen.
delay(3000);
OCR1A = WMITTE; //PWM-Breite auf Null setzen.
OCR1B = WMITTE; //PWM-Breite auf Null setzen.
delay(3000);
OCR1A = WMIN; //PWM-Breite auf Null setzen.
OCR1B = WMIN; //PWM-Breite auf Null setzen.
delay(3000);
}
Code 0-2: Modellbau-Servos auf OC1A und OC1B mittels Timer 1 mit hoher Genauigkeit ansteuern.
Übungen
|
Datenblatt zu HDSP-B08G: https://www.farnell.com/datasheets/2095874.pdf
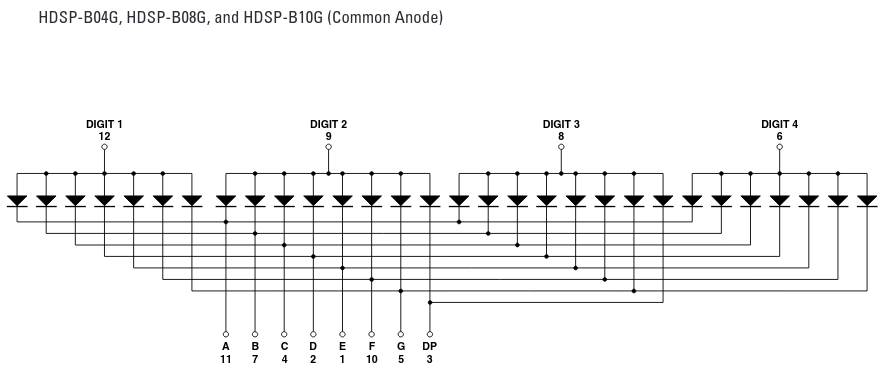
Bild 0-1: Pinbelegung bei der 4-fach-7-Segmentanzeige HDSP-B08G.
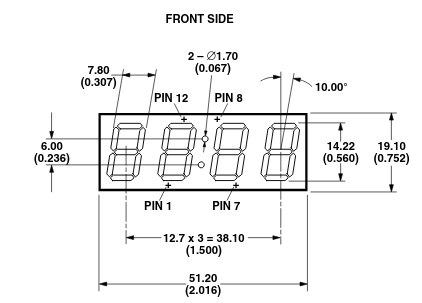
Bild 0-2: Lage der Pins bei HDSP-B08G.
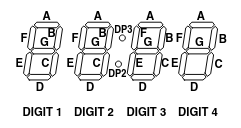
Bild 0-3: Zuordnung der LEDs zu den Pins.