LV #9, 05.06.2024 Grundlagen der Mikrocontrollertechnik im Sommersemester 2024
(EN google-translate)
(PL google-translate)
Thema: Miniprojekt Motortreibertester
Motivation
|
Ein Datenblatt des Moduls findet sich beispielsweise hier:
 https://www.roboter-bausatz.de/media/pdf/8b/81/46/L9110_Datasheet59880680d9819.pdf
https://www.roboter-bausatz.de/media/pdf/8b/81/46/L9110_Datasheet59880680d9819.pdf
Das von Ihnen noch zu verfeinernde und dann umzusetzende Grobkonzept sieht aus, wie folgt:
Die Schaltung soll nach folgendem Stromlaufplan umgesetzt werden:
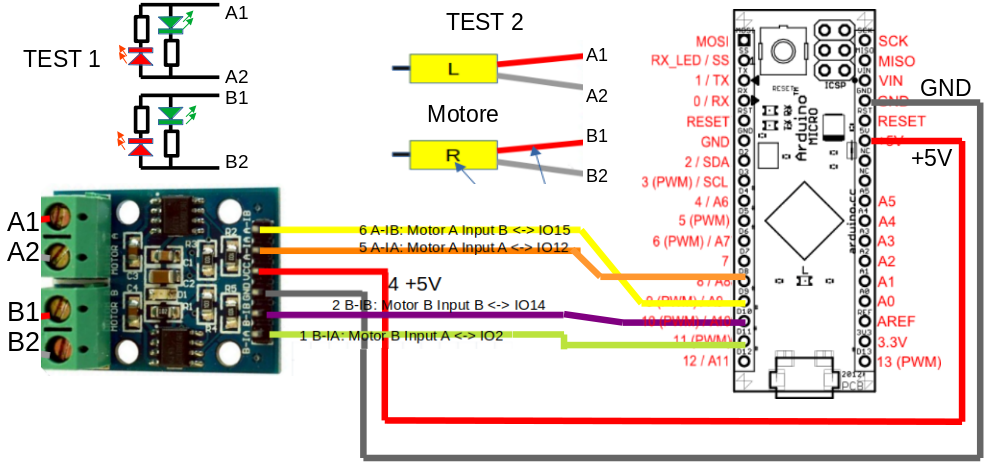
Bild 0-1: Stromlaufplan zum Motortreiber-Tester.
|
| Signal Nr. | Motor A Input A | Motor A Input B | Motor B Input A | Motor B Input B |
|---|---|---|---|---|
| 0 | 0 Volt | 0 Volt | 0 Volt | 0 Volt |
| 1 | 5 Volt | 0 Volt | 0 Volt | 0 Volt |
| 2 | 0 Volt | 5 Volt | 0 Volt | 0 Volt |
| 3 | 0 Volt | 0 Volt | 5 Volt | 0 Volt |
| 4 | 0 Volt | 0 Volt | 0 Volt | 5 Volt |
Tabelle 0-1: Signale auf die Eingänge des Motortreibers.
|
https://www.arduino.cc/reference/en/language/functions/communication/serial/read/
|
Zur Generierung von PWM-Signalen und der prinzipiellen Leistungselektronik H-Brücke, siehe auch:
 40_Mikrocontroller/04_PWM/02_Nutzen
40_Mikrocontroller/04_PWM/02_Nutzen
Die ganze Abfolge von TEST 2 soll vom Benutzer durch Senden der Ziffer 5 automatisch erfolgen.
Um die PWM-Signale zu erzeugen, sollen die Register-Konfigurationen wie hier beschrieben verwendet werden:
03_SoSe2024/06_Mik_02_05_2024 -- siehe Code 0-2.
ACHTUNG: Anders als beim Servo, steht beim Motor die ganze mögliche PWM-Breite 0 bis 12499 zur Verfüung.
|
Zusatzaufgaben
|
void setup()
{
// Start the serial communication
Serial.begin(9600);
while (!Serial)
{
; // Wait for the serial port to connect. Needed for native USB port only
}
DDRB |= 0xF0; // Define PB5 to PB7 as output
PORTB = 0x00; // Set everything to LOW
}
char incomingChar = '0';
void loop()
{
// Check if data is available to read
if (Serial.available() > 0)
incomingChar = Serial.read();
if(incomingChar == '0')
PORTB = 0x00; //All LOW
else if(incomingChar == '1')
PORTB = 0x80; //PB7 HIGH
else if(incomingChar == '2')
PORTB = 0x40; //PB6 HIGH
else if(incomingChar == '3')
PORTB = 0x20; //PB5 HIGH
else if(incomingChar == '4')
PORTB = 0x10; //PB4 HIGH
}
Code 0-1: Studentische Lösung für den ersten Teil der Übung (ohne PWM).