Steuerung des Fahrzeugs über W-LAN
(EN google-translate)
(PL google-translate)
Im folgenden wird das Processing-Programm, mit dem zuvor die Lampe (siehe 1.6) angesteuert wurde noch einmal genutzt, um auch die korrekte Ansprechbarkeit der Motoren zu testen.
Aktivieren Sie wieder den Hotspot und lassen den Laptop sich bei dem Hotspot anmelden, wie in Kapitel 1.6 beschrieben:
 siehe auch 06_Ing/01_Bauplan/06_Lampe
siehe auch 06_Ing/01_Bauplan/06_Lampe
Leider verursacht der Motortreiber beim Booten des Fahrzeugs Störungen, weshalb er abgesteckt werden muss vor dem Verbinden des USB-Seriell-Umsetzers mit der Powerbank:
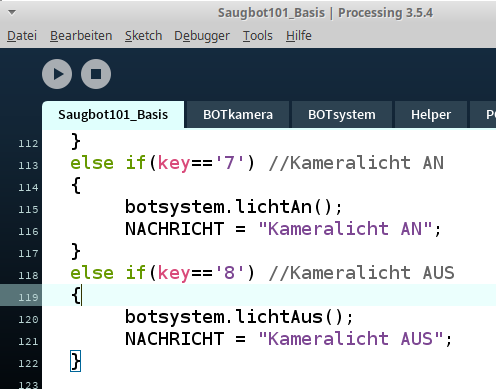
Bild 0-1: Geöffneter Processing-Sketch Saugbot101_Basis, kann durch Drücken des nach rechts weisenden Pfeils oben im Sketch gestartet werden.
 Saugbot101_Basis.zip -- Download des verwendeten Processing-Sketches.
Saugbot101_Basis.zip -- Download des verwendeten Processing-Sketches.
NEUE VERSION!:
Saugbot202_Bande.zip -- NEU, UPDATE 07.11.2024 Bitte ab jetzt dieses Projekt benutzen!
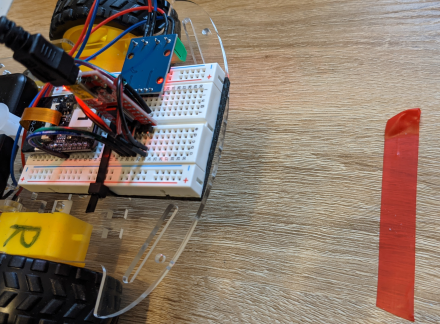
Bild 0-2: Test mit roter Grenze.
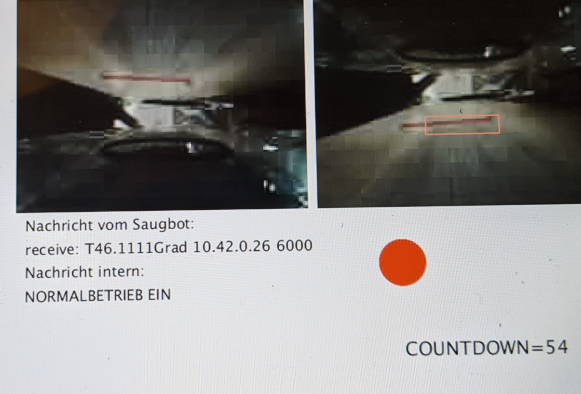
Bild 0-3: Test mit roter Grenze im Normalbetrieb (Taste 9).
06_Ing/01_Bauplan/11_Antriebstest/bande.ogv -- Video: Erreichen einer roten Begrenzung.
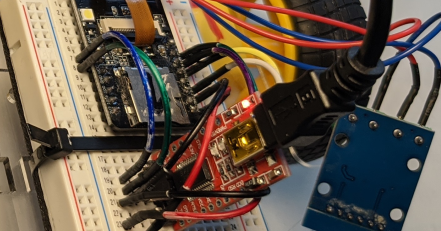
Bild 0-4: Motortreiber abgesteckt während des Bootvorgangs.
 Funktionstest esp32AV "Skorpion": https://youtu.be/EN6bdxJOnAs
Funktionstest esp32AV "Skorpion": https://youtu.be/EN6bdxJOnAs
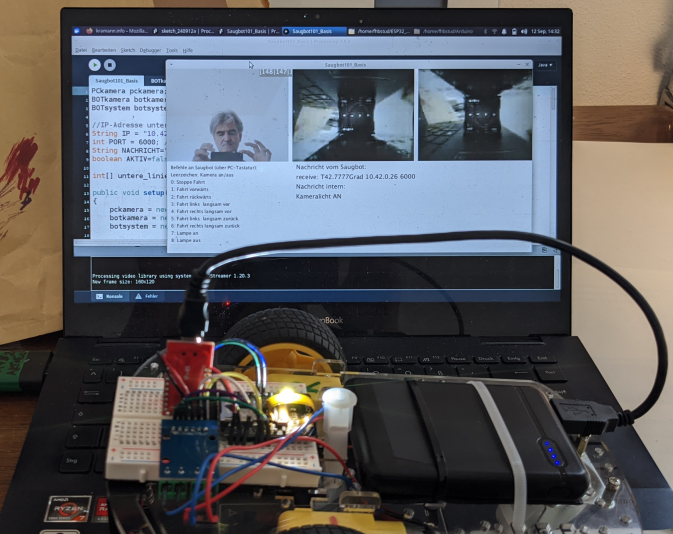
Bild 0-5: Funktionstest des autonomen Fahrzeugs mit Hilfe des Java/Processing-Sketches Saugbot101_Basis. Gerade wurde die LED-Leuchte ferngesteuert eingeschaltet.
Umsetzen der Linienverfolgung als abschließender Test
|
Processing-Sketch für das Linienverfolgen: Saugbot005_kopf.zip
esp32AV "Skorpion", "Linienkriechen" -- https://youtu.be/SVcHWJRBFwU
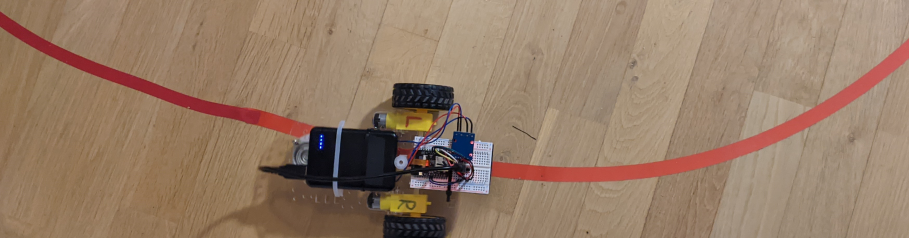
Bild 0-6: Linienverfolgung.