DAY BY DAY zu AUT -- Entwicklung autonomer mobiler Systeme
(EN google-translate)
(PL google-translate)
Übersicht
|
Die Lehrveranstaltung Entwicklung autonomer mobiler Systeme wird als Wahlpflichtfach im Masterstudiengang Maschinenbau angeboten. In der Lehrveranstaltungen werden einerseits aktuelle und historische Konzepte zu autonom fahrenden Systemen behandelt. Andererseitsd sollen konkrete Entwicklungsaufgaben Bestandteil des Unterrichts sein.
Themen sind unter anderem:
|
Untergeordnete Hilfsthemen sind:
|
Chronologisches Verzeichnis der im Verlauf des Semesters behandelten Themen
#1 Fr 18.03.2022
 Motivation / Diskussion ... Grey Walter's tortoises 1949
https://www.moralmachine.net/hl/de -- Moral Machine
Motivation / Diskussion ... Grey Walter's tortoises 1949
https://www.moralmachine.net/hl/de -- Moral Machine
 83_AV -- Einführung (Walter Gray's Turtle-robots / Fahrassistenz / FTS / Elektrokutsche)
https://www.automobil-industrie.vogel.de/was-sind-fahrerassistenzsysteme-a-890482/
https://www.youtube.com/watch?v=5TWKFHsvseo -- mercedes level 3 autonomy
https://www.youtube.com/watch?v=P9gZC1yGTRc -- Der Mercedes-Benz EQS darf in Deutschland autonom fahren! So funktioniert der ELECTRIC DRIVE PILOT!
83_AV/02_Architekturen -- Architekturen
74_EmbSyst/03_Echtzeitprogrammierung -- Echtzeitprogrammierung
83_AV -- Einführung (Walter Gray's Turtle-robots / Fahrassistenz / FTS / Elektrokutsche)
https://www.automobil-industrie.vogel.de/was-sind-fahrerassistenzsysteme-a-890482/
https://www.youtube.com/watch?v=5TWKFHsvseo -- mercedes level 3 autonomy
https://www.youtube.com/watch?v=P9gZC1yGTRc -- Der Mercedes-Benz EQS darf in Deutschland autonom fahren! So funktioniert der ELECTRIC DRIVE PILOT!
83_AV/02_Architekturen -- Architekturen
74_EmbSyst/03_Echtzeitprogrammierung -- Echtzeitprogrammierung
Beispiele
80_Robuste_Systemintegration/30_Dreirad
80_Robuste_Systemintegration/31_Gleiter
83_AV/03_Umsetzung/05_TURTLE
83_AV/05_SUMO
|
JetBot
https://jfrog.com/connect/post/installing-cuda-on-nvidia-jetson-nano/
https://maker.pro/nvidia-jetson/tutorial/introduction-to-cuda-programming-with-jetson-nano --CUDA
https://www.sparkfun.com/products/18486
https://www.youtube.com/watch?v=mrIjtBdDQ5A
https://www.youtube.com/watch?v=zOCSRzDUI-Y
https://www.youtube.com/watch?v=MY_Fe7EN6ro
https://www.youtube.com/watch?v=9Wv9A6C6U5w
ÜBUNG 1 -- angepasst an parallel laufenden Bachelorkurs zu selbstlernenden Systemen
Teil 1: Theorie zu Unüberwachtem Lernen am Beispiel der Kohonen-Netze -- SOM -- Self Organizing Maps
Gemeinsames Lesen und Verstehen des nachfolgend dargestellten Verfahrens:
https://de.wikipedia.org/wiki/Selbstorganisierende_Karte
Im Kurs entstandene Quelltexte:
Kohonen kh;
Kohonen kh2;
public void setup()
{
kh = new Kohonen(10,10,3,0.0,255.0);
kh.show();
println("Zweites kleines Kohonen-Netz:");
kh2 = new Kohonen(3,3,2,0.0,1.0);
kh2.show();
size(500,500);
}
public void draw()
{
background(255,0,0);
fill(0,255,0);
ellipse(100,100,50,50);
}
Code 0-1: Hauptprogramm on Processing
import java.util.Random;
public class Kohonen
{
double[][][] v;
Random zufall = new Random(System.currentTimeMillis());
public Kohonen(int rasterhoehe, int rasterbreite, int vektordimension, double vmin, double vmax)
{
v = new double[rasterhoehe][rasterbreite][vektordimension];
for(int i=0;i<v.length;i++)
for(int k=0;k<v[i].length;k++)
for(int w=0;w<v[i][k].length;w++)
v[i][k][w] = zufall.nextDouble()*(vmax-vmin) + vmin;
}
public void show()
{
for(int i=0;i<v.length;i++)
{
for(int k=0;k<v[i].length;k++)
{
print("zeile="+i+" spalte="+k+" Komponenten = [");
for(int w=0;w<v[i][k].length;w++)
print(v[i][k][w]+" ");
println("]");
}
}
}
}
Code 0-2: Vom Hauptprogramm benutzte Klasse Kohonen
 KohonenNeu001.zip -- Gesamter Sketch
KohonenNeu001.zip -- Gesamter Sketch
#2 Fr 25.03.2022
Themen:
|
Fortsetzung Implementierung eines Kohonen-Netzes
Vorübungen zu Processing / Java / OOP
|
https://processing.org/
78_Processing
30_Informatik3
Übung 1
public void setup()
{
size(500,400); //Breite, Höhe eines Fensters
frameRate(30); //draw() wird 30mal pro Sek. aufgerufen
}
int xpos=0;
public void draw()
{
int ROT = 255;
int GRUEN = 127;
int BLAU = 255;
background(ROT,GRUEN,BLAU);
fill(0,255,0);
stroke(0,0,0);
ellipse(xpos, height/2, height/5, height/5);
xpos++;
xpos%=width; //Modulo Funktion x%y liefert Rest von x/y, ist also [0..y-1]
}
Code 0-3: Uebung001
Bild 0-1: Screenshot zu Übung 1.
Übung 2
public void setup()
{
size(500,400); //Breite, Höhe eines Fensters
frameRate(30); //draw() wird 30mal pro Sek. aufgerufen
Vektor v1 = new Vektor(1.0,2.0);
Vektor v2 = new Vektor(3.0,4.0);
println("v1:");
v1.show();
println("v1*5:");
v1.malSkalar(5.0);
v1.show();
println("v2:");
v2.show();
println("v1 = v1 + v2");
v1.add(v2);
println("v1:");
v1.show();
}
public void draw()
{
}
Code 0-4: Haupttab von Uebung2
public class Vektor
{
double x,y;
public Vektor(double x, double y)
{
this.x = x;
this.y = y;
}
public void malSkalar(double s)
{
this.x = this.x * s;
y*=s;
}
/** addiere zu diesem Vektor die Komponenten eines anderen hinzu */
public void add(Vektor v)
{
x = x + v.x;
y = y + v.y;
}
public void show()
{
println("x="+x+" y="+y);
}
}
Code 0-5: Tab Vektor in Sketch Uebung2
Bild 0-2: Screenshot zu Übung 2.
Uebung002.zip -- Projekt Uebung2 als zip-File
Uebung003.zip -- Länge eines Vektors als Objektmethode
Die objektorientierte Implementierung einer SOM auf der Basis eines Kohonen-Netzes soll fortgesetzt werden. Als Parameter sollen folgende Werte verwendet werden:
Zwischenstand:
KohonenNeu002.zip
Bild 0-3: Die Vektoren == Gewichte im Rasternetz werden als farbige Rechtecke dargestellt.
deltmin = 0.1;
deltmax = 0.5*Math.sqrt( (double)(zeilen*zeilen) + (double)(spalten*spalten) );
epsmin = 0.0005;
epsmax = 0.05;
Code 0-6: Parameter -- vergl. Darstellung auf Wikipedia.
Nähere Spezifikation:
|
Einführung zu Jetson Nano
Ziel u.a.:
|
Beispiel bestärkendes Lernen: Neural network racing cars around a track https://www.youtube.com/watch?v=wL7tSgUpy8w
Learning Cars -- https://www.youtube.com/watch?v=Aut32pR5PQA
Was ist ein neuronales Netz? -- https://www.youtube.com/watch?v=aircAruvnKk
Herangehensweise:
|
Sparkfun bietet ein Kit an, das ein AV auf der Basis eines Rasperry-Pi ähnliuchen Boards an, das aber eine NVIDIA Grafikkarte enthält, dessen 128 GPUs für paralleles Rechnen verwendet werden können:
https://www.sparkfun.com/products/18486
Von diesen Jetson-Bots stehen drei zur Verfügung. Zunächst wird vermittelt, wie die Board programmiert werden können, später werden sie zu Autonomen Vehikeln erweitert:
84_Jetson
#3 Fr 01.04.2022
Themen:
|
Teil 1: Fortsetzung SOM (Self Organizing Maps)
Eine Beispiellösung findet sich hier:
79_Deep_Learning/03_Unueberwachtes_Lernen
..sie soll im Verlauf der Lehrveranstaltung analysiert, nachgebaut und variiert werden.
Teil 2: Erste Schritte mit Jetson Nano
Für den Umgang mit dem Jetson Nano Board existiert nun diese Seite:
84_Jetson
Es sollen nun praktisch die hier aufgelisteten Tests durchgeführt werden, die die Steuerung von GPIO und GPU über Processing/Java ermöglichen sollen.
ÜBUNG
Analysieren Sie, wie eine Library zur Ansteuerung einer LED für Processing erstellt wurde:
84_Jetson/05_GPIO_und_JNI
|
#4 Fr 08.04.2022
Thema: Entwurf, Modellbildung und Simulation eines Testfahrzeugs
Hilfs-Beispiele:
78_Processing/06_Snippets/13_Animation -- Animation mit Processing
30_Informatik3/16_Nuetzliches/03_RungeKutta -- Formel des Runge-Kutta-Integrators
78_Processing/06_Snippets/15_Simulation -- Simulationsmodell mit Processing unter Verwendung des Runge-Kutta-Integrators
80_Robuste_Systemintegration/30_Dreirad -- Früheres komplettes Beispiel
MECHANIK
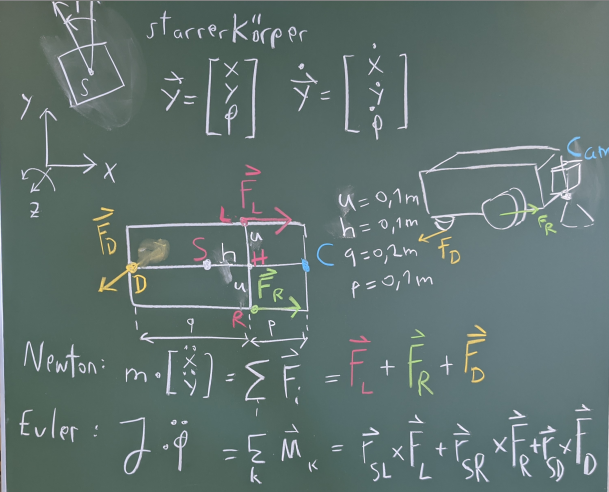
Bild 0-4: AV
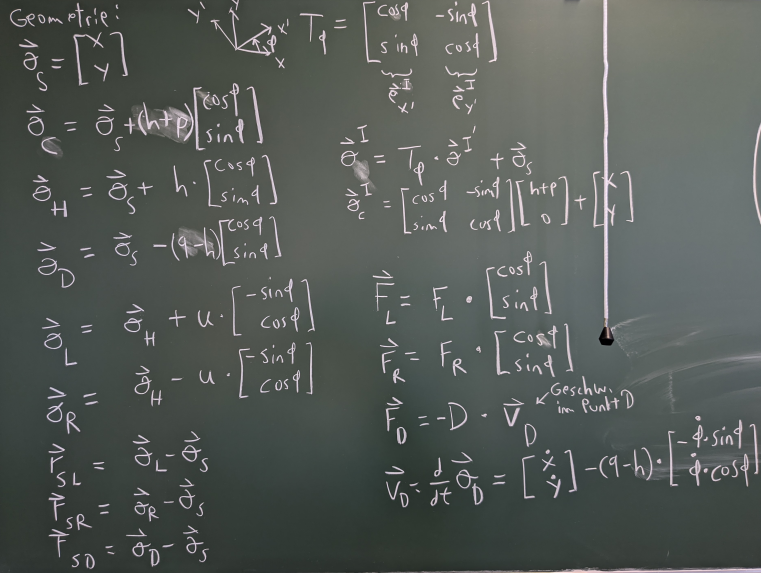
Bild 0-5: Geometrie und Kräfte
Bild 0-6: Geometrie und Kräfte

Bild 0-7: Mögliche Regegelung
UMSETZUNG IN PROCESSING
Schritt 1: Koordinatensystem passend transformieren -- AV001_Koordinatensystem.zip
Schritt 2: Visualisierung des Fahrzeugs -- AV002_Koordinatensystem.zip
Schritt 3 (unvollständig): Simulation und Animation bei konstanten Antriebskräften.
Schritt 4, vollständig, aber ohne Radquerkraft schleudert das Fahrzeug: AV004_FirstExperiment.zip
Schritt 5, Querkraft entlang L-R implementiert: AV005_Querkraft.zip
Schritt 6, Darstellung der Trajektorie: AV006_SavePath.zip
Schritt 7, Lenkregelung, um das Fahrzeug auf einer Kreisbahn zu halten: AV007_FeedbackControl.zip
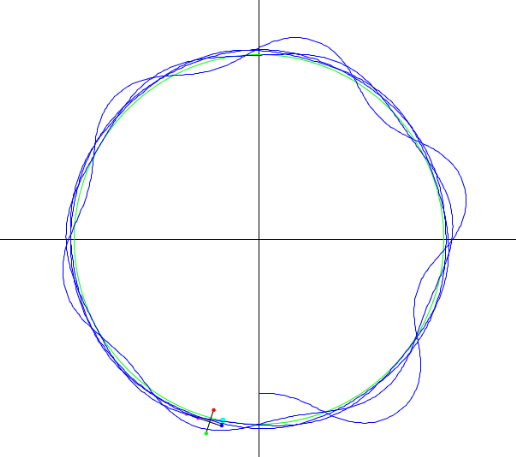
Bild 0-8: Screenshot zu AV007.
#5 Fr 22.04.2022
Inhalte heute, siehe:
84_Jetson/07_Linienverfolgung
#6 Fr 29.04.2022
Themen heute:
|
Thema 1: Agentensysteme und NASREM
83_AV/02_Architekturen
83_AV/05_SUMO/10_Umsetzung --NASREM orientierter Entwurf.
Thema 2: Fahrsteuerung über Wegmarkierungen
Mit den bisher verfügbaren Mitteln kann über mehrere Stufen ein Fahrzeug umgesetzt werden, das selber erlernt, sein Verhalten anhand Fahrbefehle symbolisierender Wegmarkierungen anzupassen.
In einer ersten Annäherung sollen die Möglichkeiten, die sich hier bieten diskutiert werden.
84_Jetson/08_Wegmarkierungen
Thema 3: Fortsetzung Linienverfolgung
84_Jetson/07_Linienverfolgung -- siehe Umsetzung weiter unten.
Übung 1
|
Übung 2
Die aktuelle Umsetzung ist zu langsam für die Generierung von PWM-Signalen.
|
#7 Fr 06.05.2022
Siehe:
84_Jetson/09_Mehr_Rot_bitte
#8 Fr 13.05.2022
Pause vom Jetson ;-)
Thema:
Automatische Verbesserung des Fahrverhaltens bei einem simulierten Fahrzeug mittels eines evolutionären Algorithmus'
Gemeinsam soll aufsetzend auf der Fahrzeugsimulation in Processing vom 08.04.2022 eine automatische evolutionäre Parameterverbesserung implementiert werden. Dies war der letzte Stand von damals:
Schritt 7, Lenkregelung, um das Fahrzeug auf einer Kreisbahn zu halten: AV007_FeedbackControl.zip
Bild 0-9: Screenshot zu AV007.
Das Ganze soll in folgenden Schritten erfolgen:
|
AV009_Fehlerfunktion.zip -- Zwischenstand 1, bei dem die Fehlerfunktion leicht aufrufbar ist.
AV009_Fehlerfunktion_stud.zip -- studentische Lösung zum Gradientenverfahren.
AV010_Fehlerfunktion_Gradientenverfahren.zip -- OOP-Umsetzung
AV010_Fehlerfunktion_EVOopt.zip -- Entwurf (unvollständig)
#9 Fr 20.05.2022 (TAG DER OFFENEN TÜR)
Themen:
|
Musterlösung: Evolutionärer Algorithmus zur Optimierung des AV
AV013_EVOopt_Musterloesung_BessereFehlerfunktion.zip
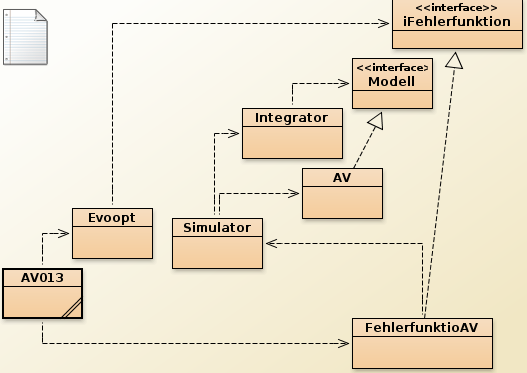
Bild 0-10: UML-Diagramm der Abhängigkeiten der Klassen unteinander.

Bild 0-11: UML-Klassendiagramme zu AV013.
Kohonen-Netz zur Kategorisierung von Untergründen
https://de.wikipedia.org/wiki/Selbstorganisierende_Karte
Neuster Stand:
Kohonenneuneuneu011.zip
ÜBUNG
|
Arbeitsschritte:
|
Modifizierte Übung: Vervollständigen Sie den evolutionären Algorithmus mit Hilfe der Klasse Evoopt:
ReinforcedLearning001.zip
ReinforcedLearning002.zip -- Musterlösung.
#10 Fr 03.06.2022
Themen
|
1. Musterlösung/Beispiel Reinforced Learning für simuliertes AV
Idee hinter dieser Implementierung: Ein Fahrzeug soll Merkmale auf einem Weg erkennen und daraufhin die richtige Richtung einschlagen.
Die richtige Richtung wird hier durch ein Referenzfahrzeug vorgegeben und zu jedem Zeitschritt kann der Abstand des Testfahrzeugs vom Referenzfahrzeug berechnet werden.
Der Sensor-Input für das neuronale Netz ist hier das 2x2-Muster (Parkett). Je Fliese gibt es einen Neuroneneingang.
Ausgang sind auch vier Neuronen, die die vier möglichen Bewegungsrichtungen repräsentieren:
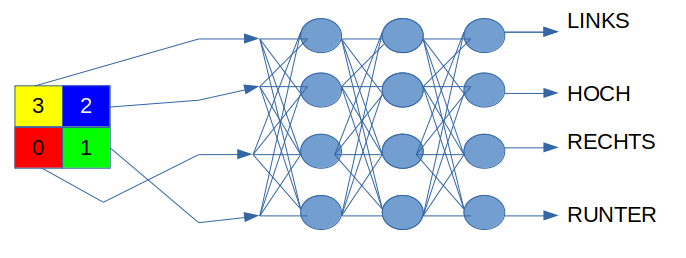
Bild 0-12: Programmstruktur: Wie aus einer Kachelung eine Bewegungsrichtung resultiert.
ReinforcedAV002.zip -- Teillösung
ReinforcedAV003.zip -- Vollständige Lösung

Bild 0-13: Schwarzer Rahmen: Referenz-Fahrzeug, türkiser Rahmen: Testfahrzeug.
Aufgabe:
|
2. Lernender Jetbot
Als Ausgangspunkt wird ein Sketch vorgegeben, der das Fahrzeug eine rote Linie verfolgen läßt und das immer für eine Weile anhält, wenn es bei einer blauen Markierung ankommt:
https://youtu.be/qYchHY61vWk -- Kreisfahrt mit Haltepunkt.

Bild 0-14: Kreisfahrt mit Haltepunkt.
JETSON.zip -- Ausgangspunkt
Files in JETSON.zip: sketchbook/TestneuJetsonMotor_Kamera_NEU006 sketchbook/libraries/jetson opt/jetsonmotor.so Der Sketch "TestneuJetsonMotor_Kamera_NEU006" kommt in das home-Verzeichnis in das sketchbook: ~/sketchbook/TestneuJetsonMotor_Kamera_NEU006 Die Library "jetson" (ganzer Ordner) kommt nach: ~/sketchbook/libraries/jetson Die dynamische Bibliothek (File) kommt nach: /opt/jetsonmotor.so
Code 0-7: Files in JETSON.zip
AUFGABEN
Ausgehend von Sketch TestneuJetsonMotor_Kamera_NEU006 sollen nach und nach verschiedene Aufgaben erfüllt werden.
Aufgabe 1 -- Ausgangssketch testen
Bringen Sie TestneuJetsonMotor_Kamera_NEU006 auf Ihrem Fahrzeug zum Laufen.
Aufgabe 2 -- Rundendauer abspeichern und anzeigen
Nützliche Methoden in Processing:
long T = System.currentTimeMillis(); //Systemzeit seit 1977 in Millisekunden
String[] arr = {"1.0","3.0"}; //String-Array anlegen
arr[0] = ""+3.567; //Double-Wert in String umwandeln und ablegen.
saveStrings("name.txt",arr); //String-Array speichern.
String[] arr = loadStrings("name.txt"); // Textfile mit Zeilen laden.
double x = Double.parseDouble("3.56"); // String in Zahl umwandeln.
Code 0-8: Nützliche Methoden in Processing.
Speichern Sie den Sketch unter Gruppe_GRUPPENNAME_Aufgabe2. Bitte GRUPPENNAME untereinander abstimmen.
In der Wartephase soll die Dauer der letzten Runde in Millisekunden angezeigt werden-
Außerdem soll nach jeder Runde eine Textdatei abgespeichert werden, die im Namen die Rundendauer trägt und die wichtigsten Parameter als Wert enthält.
Aufgabe 3 -- Grandientenverfahren implementieren und testen
Speichern Sie den Sketch unter Gruppe_GRUPPENNAME_Aufgabe3.
Nun soll ein modifiziertes Gradientenverfahren nach und nach die Parameter verbessern.
Implementieren und Testen Sie ein solches Verfahren.
|
Nach jeder Runde soll nun in der gespeicherten Datei eine Liste aller Parametervarianten und dem jeweiligen Fehler stehen. Am Ende soll immer gesondert der bislang beste Parametersatz und der zugehörige Fehler stehen.
Aufgabe 4 -- NN offline trainieren und dann am realen System testen
|
3. Staubsaugroboter
|
#11 Fr 10.06.2022
Neuer Ausgangspunkt:
Das nachfolgende .zip-File enthält ein verbessertes Projekt für den Jetson Bot.
|
TestneuJetsonMotor_Kamera_NEU007.zip -- mit Speicherung der Rundenzeiten und -daten.
AUFGABEN in den Gruppen
Aufgabe 1 -- Neuen Parcours erstelle und neues Script testen.
|
Aufgabe 2 -- Gradientenverfahren implementieren und zeigen, dass es funktioniert
|
Machen Sie ein Video, in dem die Parameterverbesserung erkennbar ist.
Erzeugen Sie von dem funktionierenden Projekt ein .zip-File und laden es bei Moodle im Kurs bei SketchAufgabe2 hoch.
Aufgabe 3 -- Vorhandensein der roten Linie als Kriterium hinzufügen
|
Quiz (mündliche Prüfung) -- können Sie selber untereinander besprechen und nachfragen, wenn die richtige Antwort nicht klar ist.
|
Aufgabe 4
Schreiben Sie einen Java-Sketch mit einer Methode, die bei einem mit 1 und 0 gefüllten 32x32-Array ein Maß für die Spielgelsymmetrie bzgl. der Hochachse berechnet.
Ergänzen Sie einen Optimierer, der durch zufällige Vertauschungen zweier Matrixelemente und unter Verwendung der Symmetriefunktion nach und nach das Array möglichst symmetrisch werden läßt.
Während es Optimierungsprozesses soll die Matrix visualisiert werden.
Aufgabe 5 -- Theoretischer Entwurf eines erweiterten autonomen Vehikels
Ein Jetson-Nano-Bot soll als FTS (Fahrerloses Trasportsystem) eingesetzt werden. Dazu fährt es entlang einer geschlossenen Führungslinie.
Kleine Dinge sollen von einer von drei Stationen an jede andere mit dem Bot geschickt werden können.
Es soll drei Stationen geben, an denen der Bot alleine hält, wenn er unkonfiguriert ist, sobald er eine der Stationen erreicht.
Hat der Bot gehalten, so kann er an der aktuellen Station konfiguriert werden. Die Konfiguration legt fest, an welcher Station der Bot als nächstes halten soll. Das bedeutet: Hält der Bot an Station 1, so kann dort bestimmt werden, ob er als nächstes bei Station 1, 2 oder wieder bei 3 halten soll.
Auf diese Weise können kleine Dinge von jeder Station an jede andere mit dem Bot geschickt werden.
Entwickeln Sie ein möglichst konkretes Konzept zur Realisierung dieser Aufgabe und präsentieren es am Ende der Lehrveranstaltung.
#12 Fr 17.06.2022
Wichtig: Heute ist die LV von 8:30Uhr bis 11:45Uhr, kommende Woche ab 8:30Uhr Prüfung.
Themen
|
Studentische Lösung zu Aufgabe 4.
Musterlösung.
Musterlösung2.
Musterlösung3.
Snippets zur Lösung diverser Aufgaben beim Programmieren
Im Unterricht soll evaluiert werden, welche Teilaspekte besonders schwer zu programmieren waren und passende Codeschnipsel im Kurs entwickelt und hier zur Verfügung gestellt werden.
Fragen dazu:
|
Neue kleine Programmieraufgabe
Schreiben Sie ein Programm, das mit Hilfe des Kamerabildes die Bewegungsrichtung erkennt, in die diese bewegt wird.
Visualisieren Sie die Ergebnisse in geeigneter Weise.
Es dürfen behelfsmäßig Markierungen am Boden/auf dem Tisch verwendet werden.
|
Versuchen Sie diese Aufgabe als Prüfungsvorbereitung zu Hause umzusetzen.
50_Simulationstechnik/01_Systemtheorie/07_scilab -- Beispiel mit plot und Scilab.