SUMO-Roboter zum Tag der offenen Tür
(EN google-translate)
(PL google-translate)
 https://www.youtube.com/watch?v=lUpUQf16qzQ - SUMO-Robot-Wettbewerb in Japan.
https://www.youtube.com/watch?v=lUpUQf16qzQ - SUMO-Robot-Wettbewerb in Japan.
Worum geht es?
Beim Tag der offenen Tür der TH-Brandenburg am Freitag 29.05.2016 treten die Besucher mit einem ferngesteuerten Sumo-Robot gegen einen autonomen Sumo-Robot gleicher Bauart an.
Es geht darum, den Gegner von der Runden Platte (Arena) zu schieben.
 rp6.zip - Minimalausrüstung, um mit RP6 auf dem aktuellen Xubuntu-Image starten zu können
SUMOBOT.zip - Beispielprogramme.
rp6.zip - Minimalausrüstung, um mit RP6 auf dem aktuellen Xubuntu-Image starten zu können
SUMOBOT.zip - Beispielprogramme.
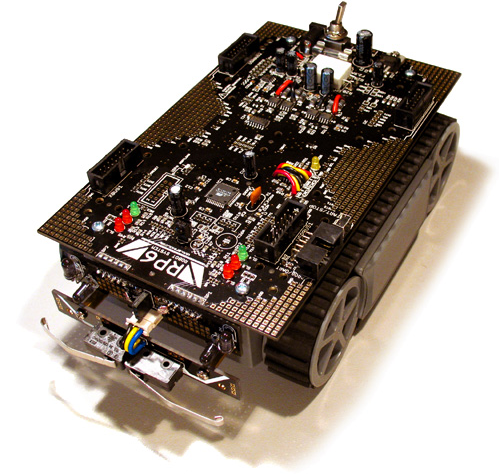
Bild 0-1: Grundlage des Robot-SUMO-Ringens sollen zwei RP6V2 bilden (Quelle http://www.arexx.com/rp6).