Synchrone Programmierung
- Um direkt zu Beginn ein Beispiel für ein Konzept zur Realisierung von Echtzeitsystemen zu geben und dadurch den Zusammenhang aufzuzeigen, in dem diese Konzepte mit den zuvor erwähnten Zielen in Bezug auf die autonomen Vehikel stehen, aufzuzeigen, wird im folgenden die Methode der Synchronen Programmierung beschrieben.
|
Was ist Synchrone Programmierung?
- Die Hauptanforderung bei der Entwicklung von Echtzeitsystemen besteht darin, mehrere Prozesse rechtzeitig auszuführen.
- Da häufig dafür nur eine Verarbeitungseinheit / CPU zur Verfügung steht und es auch wechselseitige Abhängigkeiten der Prozesse untereinander geben kann, ist dies ein nicht triviales Problem.
- Um ein Verhaken der Prozesse (Deadlock), oder eine Überschreitung der jeweiligen Gewährleistungsintervalle möglichst sicher vermeiden zu können, wurden eine Vielzahl an Strategien bei der Programmierung von Echtzeitsystemen entwickelt.
- Eine ziemlich sichere und auch in der Regel gut umsetzbare Strategie bei der Programmierung stellt die so genannte "Synchrone Programmierung" dar.
- Die Synchrone Programmierung beruht auf folgendem Prinzip:
|
- Es wird eine Zyklusdauer definiert, innerhalb der die Abarbeitung der Teilaufgaben (Tasks) geplant werden.
- Die Gesamtzyklusdauer wird mittels einer Echtzeituhr zeitlich gleichmäßig gerastert.
- Start und Ende jedes Tasks werden auf dieses Raster verteilt.
- Der Start der Tasks kann aufgrund eines Software-Interrupts geschehen, der immer wieder nach einem Rasterzeitschritt aufgerufen wird, um den anliegenden Task zu starten.
|
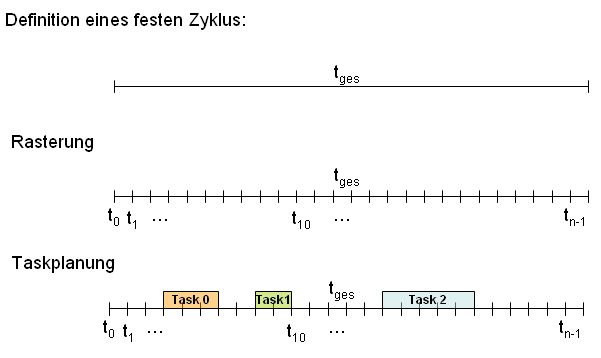
Bild 0-1: Synchrone Programmierung
- Wenn dann beim eigentlichen Ablauf des Programms die Tasks gestartet werden, dürfen sie niemals länger zur Abbarbeitung ihrer Aufgabe benötigen, wie die in der Planung angegebenen Dauer.
- Die in der Planung angegebene Dauer ist also die Maximalzeit und ihre Überschreitung kann beim realen Prozeß zu Störungen führen.
|
Übung 1
- Überlegen Sie sich möglichst konkret, wie das Konzept der Synchronen Programmierung bei den COACH2-Vehikeln auf den Mikrocontrollern programmtechnisch umgesetzt werden kann.
- Dies kann z.B. für die Funktionalitäten "Sensordaten erfassen", "Drehzahl erfassen", "Sensordaten verarbeiten", "Ansteuern der Lenkung und des Antriebs" erfolgen.
|