Setting Started
(EN google-translate)
(PL google-translate)
Allgemeine Hinweise
|
Blink-LEDs / Flashen des RP6
GRUEN SL1 == PC4 ROT SL2 == PC5 ROT SL3 == PC6
Code 0-1: Anordnung der LEDs (Die Bezeichnungen stehen auf der Platine)
#include<avr/io.h>
int main()
{
unsigned long pause=0;
DDRC |= 0b01110000;
while(1)
{
for(pause=0;pause<50000;pause++)
DDRB|=0;
PORTC |= 0b01110000;
for(pause=0;pause<50000;pause++)
DDRB|=0;
PORTC &= ~0b01110000;
}
}
Code 0-2: C-Programm blink.c
avr-gcc -O2 -mmcu=atmega32 blink.c -o blink.elf avr-objcopy -O ihex -j .text -j .data blink.elf blink.hex
Code 0-3: Kompilieren mit avrdude.
Flashen mit Programm RobotLoader
RobotLoader_20100712.zip der CD entpacken. cd ..../SumoBotCD/Software/RobotLoader_20100712/ chmod +x ./robotloader_linux.sh sudo ./robotloader_linux.sh
Code 0-4: Starten von RobotLoader
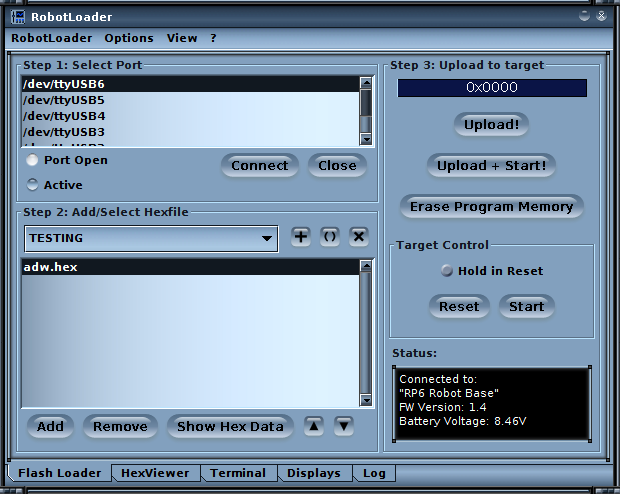
Bild 0-1: GUI von RobotLoader. (Erfolgreiche Verbindung)
OPTIONS/Preferences/SerialPort FORCE LOW SPEED CONNECT /dev/ttyUSB6 + Kategorie TESTING ADD blink.hex UPLOAD + START
Code 0-5: Auf der Oberfläche.