Snippet Winkelpaar mit dem Arduino 33 nano IoT und am Laptop mit Java/Processing
(EN google-translate)
(PL google-translate)
In den Snippet-Unterkapiteln finden sich kurze, lauffähige Programme, die auf der Basis von IMU und WiFi auf dem Arduino 33 nano IoT in Kombination mit Java/Processing am PC/Laptop bestimmte nützliche Aufgaben erfüllen.
|
ACHTUNG: Achsorientierungen mussten gegenüber letztem Snippet teilweise (x/y nicht z) geändert werden.
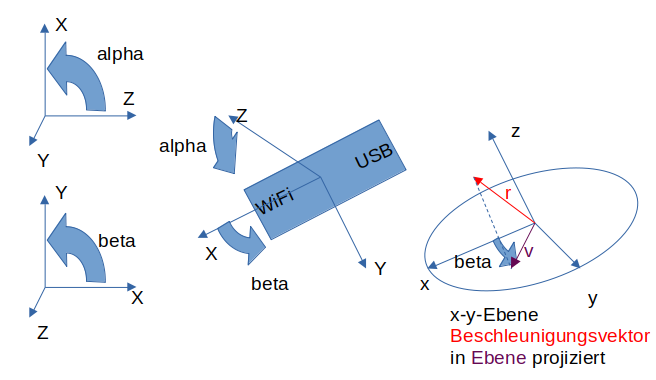
Bild 0-1: Orthogonale Achsen des Beschleunigungssensors bei Ardiono 33 NANO IoT mit Winkelpaar alpha und beta.
|
$ \vec r=\left[\begin{array}{cc}x \\ y \\ z\end{array}\right] $
Formel 0-1: Beschleunigungsvektor r
$ \vec u=\left[\begin{array}{cc}x \\ z\end{array}\right] $
Formel 0-2: Projektion von r in die x-z-Ebene ergibt Vektor u.
$ \vec v=\left[\begin{array}{cc}x \\ y\end{array}\right] $
Formel 0-3: Projektion von r in die x-y-Ebene ergibt Vektor v.
|
$ \cos \left(w\right)= \frac { \vec a \cdot \vec b}{| \vec a| \cdot | \vec b|} $
Formel 0-4: Projektion von r in die x-y-Ebene ergibt Vektor v.
|
$ \cos \left( \alpha \right)= \frac { \vec u \cdot \vec \left[\begin{array}{cc}0 \\ 1\end{array}\right]}{| \vec u|} $
Formel 0-5: Bestimmungsgleichung für \alpha .
$ \alpha =a \cos \left( \frac {z}{ \sqrt \left(x^2+z^2\right)}\right) $
Formel 0-6: Bestimmungsgleichung für \alpha aufgelöst.
|
ÜBUNG 1
|
 WiFi_IMU_Proc002.zip
WiFi_IMU_Ardu001b.zip -- korresponiderendes Arduino-Programm. Achtung: Hotspot-Adresse anpassen!
WiFi_IMU_Proc002.zip
WiFi_IMU_Ardu001b.zip -- korresponiderendes Arduino-Programm. Achtung: Hotspot-Adresse anpassen!
ÜBUNG 2
|