Grundlagen der Mikrocontrollertechnik im Sommersemester 2026
(EN google-translate)
(PL google-translate)
|
 04_SoSe2026 -- Einstiegsseite zum Sommersemester 2026 mit Angaben zu Räumen, Zeiten und den Prüfungen der einzelnen Fächer.
04_SoSe2026 -- Einstiegsseite zum Sommersemester 2026 mit Angaben zu Räumen, Zeiten und den Prüfungen der einzelnen Fächer.
#1 Di, 24.03.2026
THEMEN HEUTE
|
1. Worum geht es?
Mikrocontroller sind aus der heutigen Welt nicht mehr wegzudenken. Sie bilden typischerweise das Kernstück s.g. Eingebetteter Systeme. Das sind technische Komponenten, die typischerweise dauerhaft steuer- und regelungstechnische Aufgaben in technischen Systemen übernehmen, die zuvor von elektronischen, bzw. elektromechanischen Komponenten übernommen wurden.
2. Motivation -- Warum ist das wichtig?
Viele Aufgaben, die zuvor durch mechanische Systeme übernommen wurden, wurden zunächst durch Elektromechanische Systeme ersetzte und noch später durch Eingebettete Systeme. Der Vorteil dieser Entwicklung liegt vor allem darin, dass das Verhalten der Eingebetteten Systeme durch ein Computerprogramm festgelegt wird und nicht mehr durch elektronische Schaltungen, oder mechanische Komponenten. Dadurch können die gleichen Grundsysteme in sehr vielen Geräten eingesetzt werden. Was sie voneinander unterscheidet ist dann das Programm, dass auf ihnen läuft. Das wiederum hat zur Folge, dass Mikrocontroller in sehr hohen Stückzahlen hergestellt werden können und damit eine sehr preiswerte Produktion möglich wird.
Zudem können Updates, Anpassungen und Fehlerbehebungen oft einfach durch eine Veränderung der Software, die auf dem System läuft vorgenommen werden, anstatt eine neue Schaltung zu entwickeln, oder eine neue Mechanik entwickeln zu müssen.
Eingebettete Systeme finden Sie beispielsweise...
|
Als exemplarisches Beispiel für die Einsatzmöglichkeit eines Mikrocontrollers, sieht man hier, wie dieser werden kann, um einfache regelungstechnische Aufgaben bei kleinen autonomen Vehikeln zu übernehmen, um eine Linie zu verfolgen, oder auf einer Achse zu balancieren:
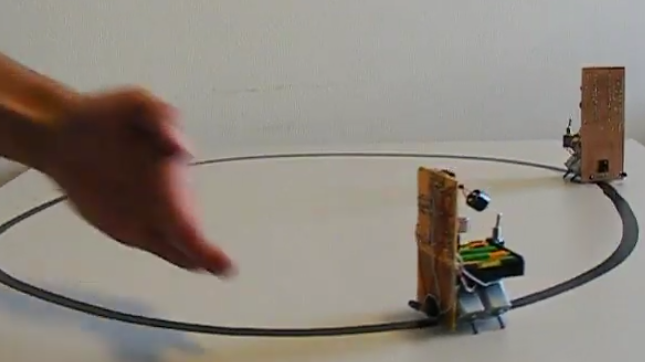
Bild 0-1: Schwarmvehikel, die eine Linie verfolgen können und auf das Auftauchen von Hindernissen reagieren.
 https://youtu.be/YS-1RRLGtgQ -- Schwarmvehikel
https://youtu.be/YS-1RRLGtgQ -- Schwarmvehikel

Bild 0-2: Einachser (Vehikel, das auf einer Achse balanciert)
https://youtu.be/WnBl7eEdbMg -- Einachser
ÜBUNG
Versuchen Sie die nachfolgenden Fragen zu beantworten:
|
3. Welche Themen werden behandelt?
|
4. Welche Leistungen sollten Sie erbringen? / Organisatorisches
|
Neben dieser Prüfung wird es Miniprojekte geben, die in Zweiergruppen zu bearbeiten sind und die dazu dienen sollen, die erlernte Theorie anzuwenden.
|
5. Einstieg
|
40_Mikrocontroller/01_Einfuehrung/02_Maschinensprache -- Unterschied zwischen Mikrocontroller und PC
|
40_Mikrocontroller/01_Einfuehrung/01_Entwicklungsgeschichtliches -- Grundidee eines Computers
|
40_Mikrocontroller/01_Einfuehrung/03_Assemblerbeispiel -- Registerbefehle
|
96_Arduino/02_Taster -- Computerprogramm für einen Arduino Mikrocontroller
|
01_Einfuehrung/05_Praxis/01_Digital_IO -- Übersicht zu Registerbefehlen im Zusammenhang mit digitalen Ein- und Ausgängen
40_Mikrocontroller/01_Einfuehrung/05_Praxis/02_Byteoperationen -- Registerbefehl-basiertes Programm
96_Arduino/22_Universal/02_LED_Leiste -- PORTB beim Arduino Micro
6. Hands on -- Die erste Übung
Aufgabe 1
|
96_Arduino/02_Taster
|
Aufgabe 2
|
96_Arduino/22_Universal/02_LED_Leiste -- PORTB beim Arduino Micro
void setup()
{
}
void loop()
{
DDRB = 255;
PORTB = 255;
}
Code 0-1: Testprogramm.
void setup()
{
}
void loop()
{
DDRB = 255;
PORTB = 1;
delay(100);
PORTB = 2;
delay(100);
PORTB = 4;
delay(100);
PORTB = 8;
delay(100);
PORTB = 16;
delay(100);
PORTB = 32;
delay(100);
PORTB = 64;
delay(100);
PORTB = 128;
delay(100);
}
Code 0-2: Lauflicht Musterlösung 2
void setup()
{
DDRB = 255;
PORTB = 255;
}
int x = 0;
void loop()
{
DDRB = 255;
PORTB = 1<<x;
x++;
x%=8;
delay(100);
}
Code 0-3: Lauflicht Musterlösung 2.
|
#2 Di, 31.03.2026
Themen diese Woche:
|
1. Quiz
|
2. Die Schildkröten des Walter Grey
Motivation / Diskussion ... Grey Walter's tortoises 1949
|
3. Eingebettete Systeme auf Wikipedia.
zu 4. Quelle: Bundestag Einzelanfrage: Einzelfragen zurHalbleiterproduktion, Seite 10. Web 21.03.2023: https://www.bundestag.de/resource/blob/900450/25b9b36d92928f932b242efc8578386a/WD-5-004-22-pdf-data.pdf
Hersteller in Europa: NXP, ST, Infineon. Japan: Renesas. USA: Microchip.
3. Angaben zur Syntax von C/C++ bei der Mikrocontrollerprogrammierung
4. Basisregister für die Programmierung digitaler Ein- und Ausgänge
|
Verwendung der internen Pullup-Widerstände -- 40_Mikrocontroller/03_DigitalIO/02_Pullup_Widerstaende
Bitmasken für den Eingang -- 40_Mikrocontroller/03_DigitalIO/03_Bitmasken_Eingang
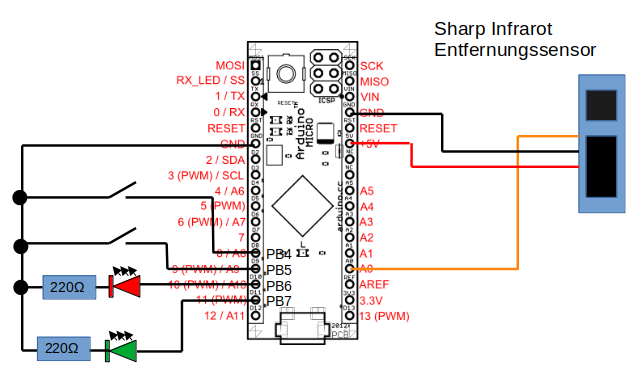
Bild 0-3: Schaltung.
BEISPIELPROGRAMME: Mit oberer Taste untere LED steuern:
void setup()
{
pinMode(11,OUTPUT);
//digitalWrite(11,HIGH);
pinMode(8,INPUT);
digitalWrite(8,HIGH);//Pullup
}
void loop()
{
if(digitalRead(8)==0)
digitalWrite(11,HIGH);
else
digitalWrite(11,LOW);
}
Code 0-4: Arduino-Befehls-Variante.
void setup()
{
//pinMode(11,OUTPUT);
DDRB = DDRB | 0b10000000; // PB7 auf 1 setzen
//pinMode(8,INPUT);
DDRB = DDRB & 0b11101111; // PB4 auf 0 setzen
//digitalWrite(8,HIGH);//Pullup
PORTB = PORTB | 0b00010000; // PB4 setzen, PULLUP
}
void loop()
{
if( (PINB & 0b00010000) == 0 )
PORTB = PORTB | 0b10000000;
else
PORTB = PORTB & 0b01111111;
}
Code 0-5: Register-Befehls-Variante.
5. Bitoperationen zur Manipulation von Mikrocontroller-Registern
& bitweise logische UND-Verknüpfung | bitweise logische ODER-Verknüpfung ~ NICHT (Invertieren aller Bits) << Links-Shift-Operator: x=1<<3; //Beispiel shiftet die 1 dreimal nach links, ergibt dezimal 8. >> Rechts-Shift-Operator: y=12>>1; //Beispiel shiftet die 12 einmal nach rechts, ergibt dezimal 6, entspricht Division durch 2.
Code 0-6: Liste mit Bitoperationen
Manipulation einzelner Bits bei Register-Befehlen durch Verwendung von Bitmasken
void setup()
{
//DDRB = 0b10000000; //PB7 als Ausgang konfigurieren.
//NUR PB7 setzen, ohne die anderen Bits zu verändern!:
DDRB = DDRB | 0b10000000; //Bitweises ODER-Verknüpfen eines Registers mit einer Bitmaske
}
void loop() {
PORTB = PORTB | 0b10000000; // 5 Volt auf Digitalpin 11 'rausschicken, bzw. auf PB7
delay(500);
PORTB = PORTB & 0b01111111;
delay(500);
}
Code 0-7: Nur höchstwertigstes Bit manipulieren (PB7), mit Hilfe von Bitmasken und Bitoperationen.
6. Umsetzung eines Lauflicht-Programms auf der Basis von Mikrocontroller-Registern in Kombination mit Bitoperationen
7. ÜBUNG
Aufgabe 1
Bauen Sie die angegebene Schaltung ohne den Entfernungssensor auf und testen die weiter oben besprochenen Programme:
Bild 0-4: Schaltung.
Aufgabe 2
|
Aufgabe 3
|
Di, 07.04.2026 -- keine Lehrveranstaltung wegen Ostern
#3 Di, 14.04.2026
Themen heute:
|
1. Lösungen zur Fussgängerampel-Aufgabe
void setup()
{
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
digitalWrite(10,HIGH);
pinMode(8,INPUT);
digitalWrite(8,HIGH);//Pullup
}
void loop()
{
if(digitalRead(8)==0)
{
digitalWrite(11,HIGH);
digitalWrite(10,LOW);
delay(2000);
digitalWrite(10,HIGH);
digitalWrite(11,LOW);}
else
{
digitalWrite(10,HIGH);
}
}
Code 0-8: Studentische Lösung.
void setup()
{
//pinMode(10,OUTPUT);
//pinMode(11,OUTPUT);
DDRB = DDRB | 0b11000000; // PB6 und PB7 auf 1 setzen
//pinMode(8,INPUT);
DDRB = DDRB & 0b11101111; // PB4 auf 0 setzen
//digitalWrite(8,HIGH);//Pullup
PORTB = PORTB | 0b00010000; // PB4 setzen, PULLUP
}
void loop()
{
if( (PINB & 0b00010000) == 0 )
{
PORTB = PORTB | 0b10000000;
PORTB = PORTB & 0b10111111;
delay(2000);
PORTB = PORTB & 0b01111111;
PORTB = PORTB | 0b01000000;
}
else
{
PORTB = PORTB | 0b01000000;
}
}
Code 0-9: Studentische Lösung mit Registerbefehlen.
2. Bussysteme
Bussysteme -- 40_Mikrocontroller/06_UART/01_Bussysteme
3. Die UART Schnittstelle
UART - Universal Asynchronous Receiver Transmitter -- 40_Mikrocontroller/06_UART
UART -- 40_Mikrocontroller/06_UART/02_UART
RS232 -- 40_Mikrocontroller/06_UART/03_RS232
Hardware - Verbinden eines ATmega32 mit einem PC über die RS232 Schnittstelle -- 40_Mikrocontroller/06_UART/04_Hardware
Senden -- 40_Mikrocontroller/06_UART/05_Senden
4. Übung Datenaustausch zwischen Mikrocontroller und Arduino
|
|
Damit die Übetragung nicht zu schnell läuft, wird die delay-Funktion benötigt.
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.write('H');
Serial.write('a');
Serial.write('l');
Serial.write('l');
Serial.write('o');
Serial.write('!');
Serial.write('\n');
delay(500);
}
Code 0-10: Im Unterricht entwickeltes Programm "Hallo!".
void setup()
{
DDRB |= 0b10000000;
PORTB &= 0b01111111;
Serial.begin(9600);
}
void loop()
{
if(Serial.available())
{
int x = Serial.read();
if(x=='1')
{
PORTB |= 0b10000000;
}
else if(x=='0')
{
PORTB &= 0b01111111;
}
}
}
Code 0-11: Im Unterricht entwickeltes Programm LED Fernsteuerung.
AUFGABE 1
|
| Schalter PB5 geschlossen | Schalter PB4 geschlossen | an PC senden |
|---|---|---|
| NEIN | NEIN | 0 |
| NEIN | JA | 1 |
| JA | NEIN | 2 |
| JA | JA | 3 |
Tabelle 0-1: Binäre Kodierung der Schalterzustände.
|
AUFGABE 2
|
AUFGABE 3
|
#4 Di, 21.04.2026
Themen heute:
|
1. Besprechung der Übungsaufgaben von letzter Woche
void setup()
{
DDRD = DDRB | 0b11000000;
// DDRD |= 0b11000000;
PORTB = PORTB & 0b00111111;
Serial.begin(9600);
}
void loop()
{
// 0 1 2 3
// 00 01 10 11
if(Serial.available()>0)
{
int incomingByte = Serial.read();
Serial.print("I recerived: ");
Serial.println((char)incomingByte);
if(incomingByte=='0')
{
PORTB = PORTB & 0b00111111;
}
else if(incomingByte=='1')
{
PORTB = PORTB & 0b01111111; //PB7 aus
PORTB = PORTB | 0b01000000; //PB6 an
}
else if(incomingByte=='2')
{
PORTB = PORTB & 0b10111111; //PB6 aus
PORTB = PORTB | 0b10000000; //PB7 an
}
else if(incomingByte=='3')
{
PORTB = PORTB | 0b11000000; //PB6 und PB7 an
}
}
}
Code 0-12: Fernsteuern zweier LEDs studentische Lösung.
void setup()
{
DDRD = DDRB | 0b11000000;
// DDRD |= 0b11000000;
PORTB = PORTB & 0b00111111;
Serial.begin(9600);
}
void loop()
{
// 0 1 2 3
// 00 01 10 11
if(Serial.available()>0)
{
int incomingByte = Serial.read();
Serial.print("I recerived: ");
Serial.println((char)incomingByte);
// '0'==48 '1'==49 '2'==50 '3'==51
// incomingByte - '0'; =>
// 0 1 2 3
// 00 01 10 11
// 00000011 ist
// 11000000 soll
incomingByte = incomingByte - '0'; // '0'==48
//PORTB = incomingByte << 6;
//Untere 6 Bits nicht manipulieren:
PORTB |= (incomingByte << 6);
PORTB &= (incomingByte << 6) + 0b00111111;
}
}
Code 0-13: Zweite Lösung unter Verwendung von Bitshiftoperatoren.
2. Objektorientierte Programmierung mit dem Arduino Mikrocontroller
40_Mikrocontroller/08_OOP -- Motivation zu OOP.
40_Mikrocontroller/08_OOP/01_Probleme -- was es im Zusammenhang mit Mikrocontrollern bei OOP zu beachten gilt.
40_Mikrocontroller/08_OOP/02_Konzept -- Grundkonzept Singleton als UML-Klassendiagramm.
3. Anwendungsbeispiel Bussysteme: Verbindung zu einem IMU-Sensor (MPU6050)
Verwendung eines IMU vom Typ MPU6050 über das I2C (aus patentrechtlichen Gründen im Datenblatt TWI -- Two Wire Interface -- genannt) Bussystem genannt
|
96_Arduino/31_day_by_day -- siehe "Verwendung eines MPU6050 Beschleunigungssensors"
15_Einachser/02_Bauanleitung/06_MPU6050 -- Anwendungsfall Einachser
https://youtu.be/WnBl7eEdbMg -- Video zum Einachser
4. Übungen
Aufgabe 1 (gemeinsam)
------------- |LED | ------------- |+on() : bool| |+off(): bool| -------------
Code 0-14: UML Klassendiagramm zur LED Klasse
|
30_Informatik3/02_UML/02_UML_Klassendiagramm

Variante:
#include "Led.h"
Led gruen(7);
Led rot(6);
void setup()
{
Serial.begin(9600);
}
void loop()
{
if(Serial.available())
{
int zeichen = Serial.read();
if(zeichen=='r')
{
rot.on();
gruen.off();
}
else if(zeichen=='g')
{
rot.off();
gruen.on();
}
}
}
Code 0-15: Hauptprogramm.
class Led
{
public:
Led(int aktuellesBit)
{
meinBit = aktuellesBit;
}
void on()
{
PORTB |= (1<<meinBit);
}
void off()
{
PORTB &= ~(1<<meinBit); // ~ Tilde invertiert bitweise das Bitmuster
}
private:
int meinBit;
};
Code 0-16: Klasse in Led.h
LEDoop2.zip -- Obige Variante.
Aufgabe 2
|
------------- |IMU | ------------- |+start() | |+acx(): int | |+acy(): int | |+acz(): int | -------------
Code 0-17: UML Klassendiagramm zur IMU Klasse
Aufgabe 3
|
#include<math.h>
#include<Wire.h>
//MPU6050:
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ;
int x,y,z;
void setup()
{
//MPU6050
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
pinMode(12,1);
digitalWrite(12,0);
}
void loop()
{
// put your main code here, to run repeatedly:
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,6,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
x = (AcX/163);
if(x>100) x=100;
if(x<-100) x=-100;
y = (AcY/163);
if(y>100) y=100;
if(y<-100) y=-100;
z = (AcZ/163);
if(z>100) z=100;
if(z<-100) z=-100;
Serial.print(x);
Serial.print(" ");
Serial.print(y);
Serial.print(" ");
Serial.println(z);
if(z<90)
digitalWrite(12,1);
else
digitalWrite(12,0);
delay(200);
}
Code 0-18: Musterlösung Verkippwarner nicht objektorientiert.
OOP Lösung
#include<math.h>
//#include<Wire.h>
#include "IMU.h"
IMU imu; // Singleton
int x,y,z;
void setup()
{
Serial.begin(9600);
imu.start();
pinMode(12,1);
digitalWrite(12,0);
}
void loop()
{
// put your main code here, to run repeatedly:
imu.update();
x = (imu.getacx()/163);
if(x>100) x=100;
if(x<-100) x=-100;
y = (imu.getacy()/163);
if(y>100) y=100;
if(y<-100) y=-100;
z = (imu.getacz()/163);
if(z>100) z=100;
if(z<-100) z=-100;
Serial.print(x);
Serial.print(" ");
Serial.print(y);
Serial.print(" ");
Serial.println(z);
if(z<90)
digitalWrite(12,1);
else
digitalWrite(12,0);
delay(200);
}
Code 0-19: Hauptprogramm.
#include<Wire.h>
class IMU
{
private:
//MPU6050:
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ;
public:
void start()
{
//MPU6050
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
}
void update()
{
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,6,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
}
int getacx()
{
return AcX;
}
int getacy()
{
return AcY;
}
int getacz()
{
return AcZ;
}
};
Code 0-20: IMU.h
IMUtest002.zip -- OOP Projekt.
#5 Di, 28.04.2026
Themen heute:
|
1. Besprechung studentischer Lösungen zu Klasse für IMU und Verkippwarner.
Siehe: Code 0-6: MPU6050 testen. Hier: 96_Arduino/31_day_by_day
2. Wiederholung OOP
40_Mikrocontroller/08_OOP
96_Arduino/24_OOP
3. Das Datenblatt zum ATmega32u4
96_Arduino
kramann.info/96_Arduino/Atmel-7766-8-bit-AVR-ATmega16U4-32U4_Datasheet.pdf
4. Register zu DIO im Datenblatt
96_Arduino/22_Universal/02_LED_Leiste
40_Mikrocontroller/03_DigitalIO
45_Mikro17/03_DigitalIO
5. Einführung zu Timer
45_Mikro17/04_Timer/01_Generierung
6. Der 16-Bit Timer 1 im ATmega32u4 im Datenblatt
45_Mikro17/04_Timer/02_Timer1_Servo
7. PWM mittels Registerkonfiguration / PWM allgemein
40_Mikrocontroller/04_PWM/01_Prinzip
40_Mikrocontroller/04_PWM/02_Nutzen
40_Mikrocontroller/04_PWM/08_LoesungUE3 -- Servos
45_Mikro17/04_Timer/02_Timer1_Servo
8. Übungen mit Modellbau-Servos
Aufgabe 1
|
https://projecthub.arduino.cc/hockey1alex/servo-sweep-1a24d6
Aufgabe 2
|
Code Code 0-1: Datei servofein.ino hier: 45_Mikro17/04_Timer/02_Timer1_Servo
Aufgabe 3
|
Aufgabe 4
|
#6 Di, 05.05.2026
Themen heute: Vertiefung Timer Konfiguration
|
1. Ergänzungen zur Analyse des PWM-Gebers mit Timer 1
|
2. Möglichkeit einer genaueren Servo-Ansteuerung (Aufgabe 4 letzte Woche)
|
3. Timer 2 und CTC-Mode
45_Mikro17/10_ADW/02_Zaehler -- Timer als frei laufender Zähler
ACHTUNG: while(TCNT2<36); wird womöglich vom Compiler wegrationalisiert. Besser: while(TCNT2<36) PORTB|=PORTB;
4. Effiziente Echtzeit-Programmierung mittels State-Machine
|
67_Echtzeitsysteme/12_Zustandsmaschine -- Konzept einer Zustandsmaschine umgesetzt mit switch und case.
|
#define WMIN 1000
#define WMITTE 1500
#define WMAX 2000
#define SCHRITTE 1000
//Mode 8
//Phasen- und Frequenz-korrekt
//WGM1 3 2 1 0
// 1 0 0 0
//ICR1=..... TOP
//fpwm = fclk/(2*N*TOP)
//Vorteilung
//N=8
//80Hz = 16000000/(2*8*TOP)
//TOP = 16000000/(2*8*80Hz)=12500
//dt==1000ms*(1/80Hz)/12500 == 0,001ms (1 Schritt == 0,001ms)
//=>
//1ms == 1000 Schritte
//1,5ms == 1500 Schritte
//2ms == 2000 Schritte
void setup()
{
TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0) | (0<<COM1C1) | (0<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (0<<CS10); //Vort. 256, s.S. 125
ICR1=12500;
DDRB |= (1<<PB5); //OCR1A
DDRB |= (1<<PB6); //OCR1B
OCR1A = WMITTE; //PWM-Breite auf Mitte setzen.
OCR1B = WMITTE; //PWM-Breite auf Mitte setzen.
}
int zaehler = 0;
void loop()
{
if(zaehler<1000)
OCR1A = WMIN + zaehler;
else
OCR1A = WMIN + WMAX - zaehler;
zaehler++;
zaehler%=2000; // if(zaehler>=2000) zaehler=0;
delay(5);
}
Code 0-21: Sweep ohne Blockieren des loops mittels State-Machine.
5. Übungen
Aufgabe 1 gemeinsam
|
Aufgabe 2
|
HINWEISE: Arbeiten Sie immer zu zweit an dem Thema. Eine Entwurfs-Skizze wird im Unterricht entwickelt. Gliedern Sie die Aufgabe in Teilzielen auf und arbeiten diese nacheinander ab.
#7 Di, 12.05.2026
Themen heute:
|
1. Gemeinsame Besprechung einer studentischen Lösung zur Aufgabe 2 von letzter Woche "Mini Gimbal"
Studentische Lösung "Mini Gimbal".
#include<math.h> //neu
#include<Wire.h> //neu
#define WMIN 1000
#define WMITTE 1500
#define WMAX 2000
#define SCHRITTE 1000
const int MPU=0x68; // I2C address of the MPU-6050 neu
int16_t AcX,AcY,AcZ; //neu
int x,y,z; //neu
int zaehler = 0;
//Mode 8
//Phasen- und Frequenz-korrekt
//WGM1 3 2 1 0
// 1 0 0 0
//ICR1=..... TOP
//fpwm = fclk/(2*N*TOP)
//Vorteilung
//N=8
//80Hz = 16000000/(2*8*TOP)
//TOP = 16000000/(2*8*80Hz)=12500
//dt==1000ms*(1/80Hz)/12500 == 0,001ms (1 Schritt == 0,001ms)
//=>
//1ms == 1000 Schritte
//1,5ms == 1500 Schritte
//2ms == 2000 Schritte
void setup()
{
TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0) | (0<<COM1C1) | (0<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (0<<CS10); //Vort. 256, s.S. 125
ICR1=12500;
DDRB |= (1<<PB5); //OCR1A
DDRB |= (1<<PB6); //OCR1B
OCR1A = WMITTE; //PWM-Breite auf Mitte setzen.
OCR1B = WMITTE; //PWM-Breite auf Mitte setzen.
//MPU6050 //neu Start
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600); //neu Ende
}
void loop()
{
if(zaehler<1000)
OCR1A = WMIN + zaehler;
else
OCR1A = WMIN + WMAX - zaehler;
zaehler++;
zaehler%=2000; // if(zaehler>=2000) zaehler=0;
delay(5);
int o = 5 ; //änderung je loop
if(y<0){
OCR1B -= o;
}
else if (y>0){
OCR1B += o;
}
// put your main code here, to run repeatedly: // neu Start
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,6,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
x = (AcX/163);
if(x>100) x=100;
if(x<-100) x=-100;
y = (AcY/163);
if(y>100) y=100;
if(y<-100) y=-100;
z = (AcZ/163);
if(z>100) z=100;
if(z<-100) z=-100;
Serial.print(x);
Serial.print(" ");
Serial.print(y);
Serial.print(" ");
Serial.println(z);
Serial.print(" ");
Serial.println(OCR1B);
//neu Ende
}
/*
{
OCR1A = WMAX; //PWM-Breite auf Null setzen. //oben = OCR1A
//OCR1B = WMAX; //PWM-Breite auf Null setzen.
delay(3000);
OCR1A = WMITTE; //PWM-Breite auf Null setzen.
//OCR1B = WMITTE; //PWM-Breite auf Null setzen.
delay(3000);
OCR1A = WMIN; //PWM-Breite auf Null setzen.
//OCR1B = WMIN; //PWM-Breite auf Null setzen.
delay(3000);
} */
Code 0-22: Studentische Lösung "Mini Gimbal".
2. Gemeinsame Objektorientierte Transformation des "Mini Gimbal"
gimbal003.zip -- objektorientierte Umsetzung der studentischen Lösung zu "Mini Gimbal".
3. Kick-Off zu eigenen Miniprojekten
4. Start mit individuellen Mini-Projekten
#8 Di, 19.05.2026
Themen heute:
|
1. Quiz zu ausgewählten Themen aus der Vorlesung
|
2. Gruppenaufteilung und Festlegen der individuellen Projektthemen
3. Fortsetzung der Arbeit an den Projektthemen
#9 Di, 26.05.2026
Themen heute:
|
Die einzelnen Gruppen stellen am Ende den anderen das Funktionieren ihres Projektes am Platz vor und erläutern im Anschluss am Beamer ihren Quelltext.
Bitte laden Ihr Arduino-Projekt als ZIP-File bei Moodle bei der vorbereiteten Upload-Möglichkeit hoch.
|
#10 Di, 02.06.2026
|
Themen heute:
|
1. 12:30-12:50 Vorbereitung auf die Vorstellung der Quelltexte zu den Projekten
Bitte beachten Sie:
|
Bitte nehmen Sie sich Zeit und überlegen Sie vor diesem Hintergrund genau, wie genau Sie dabei vorgehen werden, Ihr Programm Ihren Mitstudierenden zu erklären.
2. 12:50-13:30 Präsentation der Projektquelltexte
MikrocontrollerProjekte.zip -- Alle verfügbaren Quelltexte zu den Mikrocontroller Projekten.
3. 13:30-14:15 Bearbeitung Übung 1a
Übung 1
|
Schalter1 | Schalter2 | LED1|LED2|LED3|LED4 --------------------------------------------- offen | offen | AN |AUS |AUS |AUS geschlossen| offen | AUS |AN |AUS |AUS offen | geschlossen| AUS |AUS |AN |AUS geschlossen| geschlossen| AUS |AUS |AUS |AN
Code 0-23: Logiktabelle zur Funktion des Programms.

Bild 0-5: Schaltplan zu Übung 1.
|
|
4. 14:15-14:30 Besprechung Übung 1a
const int LED_ROT = 10;
const int LED_GRUEN = 11;
const int LED_BLAU = 9;
const int LED_GELB = 8;
const int SWITCH_1 = 2;
const int SWITCH_2 = 3;
void setup() {
pinMode(LED_GRUEN, OUTPUT);
pinMode(LED_ROT, OUTPUT);
pinMode(LED_BLAU, OUTPUT);
pinMode(LED_GELB, OUTPUT);
pinMode(SWITCH_1, INPUT);
pinMode(SWITCH_2, INPUT);
digitalWrite(SWITCH_1, HIGH);
digitalWrite(SWITCH_2, HIGH);
}
void loop() {
int statusSchalter1 = 1 - digitalRead(SWITCH_1); //inverser Zustand
int statusSchalter2 = 1 - digitalRead(SWITCH_2);
if (statusSchalter1 == LOW && statusSchalter2 == LOW)
{
digitalWrite(LED_GRUEN, HIGH);
digitalWrite(LED_ROT, LOW);
digitalWrite(LED_BLAU, LOW);
digitalWrite(LED_GELB, LOW);
}
else if (statusSchalter1 == HIGH && statusSchalter2 == LOW)
{
digitalWrite(LED_GRUEN, LOW);
digitalWrite(LED_ROT, HIGH);
digitalWrite(LED_BLAU, LOW);
digitalWrite(LED_GELB, LOW);
}
else if (statusSchalter1 == LOW && statusSchalter2 == HIGH)
{
digitalWrite(LED_GRUEN, LOW);
digitalWrite(LED_ROT, LOW);
digitalWrite(LED_BLAU, HIGH);
digitalWrite(LED_GELB, LOW);
}
else //if (statusSchalter1 == HIGH && statusSchalter2 == HIGH)
{
digitalWrite(LED_GRUEN, LOW);
digitalWrite(LED_ROT, LOW);
digitalWrite(LED_BLAU, LOW);
digitalWrite(LED_GELB, HIGH);
}
}
Code 0-24: Studentische Lösung.
5. 14:30-15:15 Bearbeitung Übung 1b
6. 15:15-15:30 Besprechung Übung 1b
void setup()
{
// pinMode(2, INPUT); // SCHALTER 1
DDRD = DDRD & 0b11111110; // PD0 auf 0 setzen
//pinMode(3, INPUT); // SCHALTER 2
DDRD = DDRD & 0b11111101; // PD1 auf 0 setzen
//pinMode(11,OUTPUT);
DDRB = DDRB | 0b10000000; // PB7 auf 1 setzen
//pinMode(10,OUTPUT);
DDRB = DDRB | 0b01000000; // PB6 auf 1 setzen
//pinMode(9,OUTPUT);
DDRB = DDRB | 0b00100000; // PB5 auf 1 setzen
//pinMode(8,OUTPUT);
DDRB = DDRB | 0b00010000; // PB4 auf 1 setzen
// digitalWrite(2, INPUT_PULLUP);
PORTD = PORTD | 0b00000001; // PD0 setzen, PULLUP
// digitalWrite(3, INPUT_PULLUP);
PORTD = PORTD | 0b00000010; // PD1 setzen, PULLUP
}
void loop()
{
if ((PIND & 0b00000001) == 0 && (PIND & 0b00000010) == 0)
{
PORTB = PORTB | 0b10000000; // PB7 HIGH
PORTB = PORTB & 0b10111111; // PB6 LOW
PORTB = PORTB & 0b11011111; // PB5 LOW
PORTB = PORTB & 0b11101111; // PB4 LOW
}
else if ((PIND & 0b00000001) == 0 && (PIND | 0b00000010) >0)
{
PORTB = PORTB & 0b01111111; // PB7 LOW
PORTB = PORTB | 0b01000000; // PB6 HIGH
PORTB = PORTB & 0b11011111; // PB5 LOW
PORTB = PORTB & 0b11101111; // PB4 LOW
}
else if ((PIND | 0b00000001) >0 && (PIND & 0b00000010) == 0)
{
PORTB = PORTB & 0b01111111; // PB7 LOW
PORTB = PORTB & 0b10111111; // PB6 LOW
PORTB = PORTB | 0b00100000; // PB5 HIGH
PORTB = PORTB & 0b11101111; // PB4 LOW
}
else // if ((PIND | 0b00000001) >0 && (PIND | 0b00000010) >0)
{ // alternativ:
PORTB = PORTB & 0b01111111; // PB7 LOW PORTB = PORTB & ~(1<<PB7);
PORTB = PORTB & 0b10111111; // PB6 LOW PORTB = PORTB & ~(1<<PB6);
PORTB = PORTB & 0b11011111; // PB5 LOW PORTB = PORTB & ~(1<<PB5);
PORTB = PORTB | 0b00010000; // PB4 HIGH PORTB = PORTB | (1<<PB5);
}
}
Code 0-25: Studentische Lösung.
#11 Di, 09.06.2026
Themen heute:
|
|
1. Übung 2a -- Anschluss und Test einer einzelnen 7-Segment-Anzeige

Bild 0-6: Pinlayout des Bauteils LTC-2723WC.
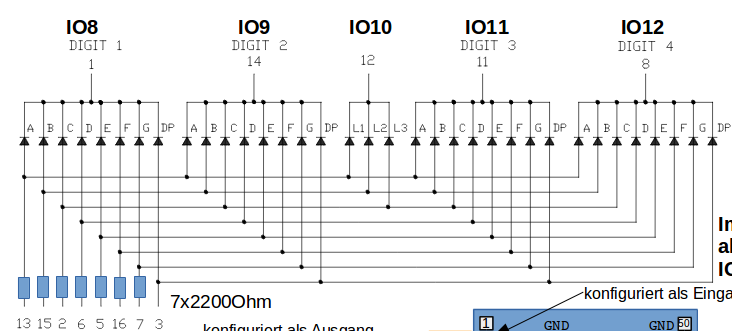
Bild 0-7: Zuordnung der Pins bei LTC-2723WC. -- Verwenden Sie bitte 220 Ohm Vorwiederstände, nicht 2200Ohm!!!
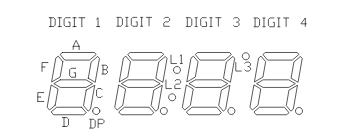
Bild 0-8: Zuordnung der Digits und Segmente A..G beim LTC-2723WC.
|
Segment | Pin bei Arduino -Bezeichner | LTC-2723WC | ----------------------------- Über 220Ohm Vorwiderstand verbunden: A | PB0 (vergl. Lauflichtbeschaltung weiter unten) B | PB1 C | PB2 D | PB3 E | PB4 F | PB5 G | PB6 Ohne Vorwiderstand verbunden: Digit 0 | PD0 / Digital Pin 3 (vergl. kramann.info/96_Arduino) Digit 1 | PD1 / Digital Pin 2 Digit 2 | PD2 / Digital Pin 0 Digit 3 | PD3 / Digital Pin 1
Code 0-26: Verbindung Digit1 mit Arduino Micro.

Bild 0-9: Lauflichtbeschaltung.
96_Arduino -- Pinlayouts Arduino Micro und ATmega32u4.
|
|
|
|
Sollte es aufgrund der Arduino-Firmware Probleme mit der Konfiguration der DIOs geben, setzen Sie die Konfigurationsbefehle an den Beginn von loop, statt setup.
2. Übung 2b -- Objektorientierte Umsetzung 7-Segment-Anzeige mit 4 Digits
|
----------------- | SiebenSegment | ----------------- | + setup() | | + set(a,b,c,d)| | + update() | -----------------
Code 0-27: UML-KLassendiagramm zur Ansteuerung des LTC-2723WC.
|
|
#include "SiebenSegment.h"
SiebenSegment segment;
void setup()
{
segment.setup();
}
void draw()
{
//segment.setup(); //ev. wegen Firmware Aufruf auch hier notwendig
segment.set(1,2,3,4);
segment.update();
delay(10);
}
Code 0-28: Testprogramm
class SiebenSegment
{
private:
int da,db,dc,dd;
int zeigeDigit;
int zeigeZahl;
public:
void setup()
{
DDRB|=0b01111111;
DDRD|=0b00001111;
zeigeDigit=0;
zeigeZahl=0;
}
void set(int a, int b, int c, int d)
{
da=a;
db=b;
dc=c;
dd=d;
}
void update()
{
if(zeigeDigit==0)
zeigeZahl=da;
else if(zeigeDigit==1)
zeigeZahl=db;
else if(zeigeDigit==2)
zeigeZahl=dc;
else //if(zeigeDigit==3)
zeigeZahl=dd;
if(zeigeZahl==0)
// GFEDCBA
PORTB = 0b00111111;
else if(zeigeZahl==1)
// GFEDCBA
PORTB = 0b00000110;
else if(zeigeZahl==2)
// GFEDCBA
PORTB = 0b01011011;
else if(zeigeZahl==3)
// GFEDCBA
PORTB = 0b01001111;
else if(zeigeZahl==4)
// GFEDCBA
PORTB = 0b01100110;
else if(zeigeZahl==5)
// GFEDCBA
PORTB = 0b01101101;
else if(zeigeZahl==6)
// GFEDCBA
PORTB = 0b01111101;
else if(zeigeZahl==7)
// GFEDCBA
PORTB = 0b00000111;
else if(zeigeZahl==8)
// GFEDCBA
PORTB = 0b01111111;
else //if(zeigeZahl==9)
// GFEDCBA
PORTB = 0b01101111;
if(zeigeDigit==0)
{
PORTD &= 0b11111110;
PORTD |= 0b00001110;
}
else if(zeigeDigit==1)
{
PORTD &= 0b11111101;
PORTD |= 0b00001101;
}
else if(zeigeDigit==2)
{
PORTD &= 0b11111011;
PORTD |= 0b00001011;
}
else //if(zeigeDigit==3)
{
PORTD &= 0b11110111;
PORTD |= 0b00000111;
}
zeigeDigit++;
zeigeDigit%=4;
}
};
Code 0-29: Tab SiebenSegment.h
#include "SiebenSegment.h"
SiebenSegment segment;
int x=0;
void setup()
{
segment.setup();
}
void loop()
{
//segment.setup(); //ev. wegen Firmware Aufruf auch hier notwendig
//segment.set(1,2,3,4);
segment.set((x/1000)%10,(x/100)%10,(x/10)%10,x%10);
segment.update();
delay(10);
x++;
x%=10000;
}
Code 0-30: Anderes Testprogramm.
3. Übung 2c -- Anzeige eines der Sensorwerte des MPU6050
Zusatzaufgabe
|
Hinweis: Verwenden Sie zur Umsetzung Code 0-20: IMU.h weiter oben wieder.
#12 Di, 16.06.2026
Themen heute:
|
1. Übung 3 -- Zahl seriell eingeben, Quadratzahl berechnen und seriell ausgeben
|
long zahl = 0;
void setup()
{
Serial.begin(9600);
Serial.println("Zahlen eingeben und am Ende mit ? bestätigen");
}
void loop()
{
if (Serial.available())
{
char c = Serial.read();
if (c >= '0' && c <= '9')
{
zahl = zahl * 10 + (c - '0');
}
if (c == '?')
{
long quadrat = zahl * zahl;
Serial.print("Zahl: ");
Serial.println(zahl);
Serial.print("Quadrat: ");
Serial.println(quadrat);
// Reset für neue Eingabe
zahl = 0;
}
}
}
Code 0-31: Studentische Lösung, die wie gefordert Ziffer für Ziffer einliest und weiter verarbeitet.
void setup()
{
Serial.begin(9600);
}
void loop()
{
if (Serial.available()>0)
{
String ziffern = Serial.readStringUntil('\n');
int eingabe = ziffern.toInt();
int ausgabe = eingabe*eingabe;
Serial.print(ausgabe);
Serial.println(" ");
}
}
Code 0-32: Studentische Lösung unter Verwendung höherer Methoden.
2. Übung 4 -- Servos mit Timer 1 ansteuern
kramann.info/96_Arduino/Atmel-7766-8-bit-AVR-ATmega16U4-32U4_Datasheet.pdf
|
#define WMIN 1000
#define WMITTE 1500
#define WMAX 2000
#define SCHRITTE 1000
//Mode 8 (vergleiche Datenblatt zum ATmega32u4, der im Arduino Micro verbaut ist)
//Phasen- und Frequenz-korrekt
//WGM1 3 2 1 0
// 1 0 0 0
//ICR1=..... TOP
//fpwm = fclk/(2*N*TOP)
//Vorteilung
//N=8
//80Hz = 16000000/(2*8*TOP)
//TOP = 16000000/(2*8*80Hz)=12500
//dt==1000ms*(1/80Hz)/12500 == 0,001ms (1 Schritt == 0,001ms)
//=>
//1ms == 1000 Schritte
//1,5ms == 1500 Schritte
//2ms == 2000 Schritte
void setup()
{
TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0) | (0<<COM1C1) | (0<<COM1C0) | (0<<WGM11) | (0<<WGM10);
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (0<<CS10); //Vort. 256, s.S. 125
ICR1=12500;
DDRB |= (1<<PB5); //OCR1A
DDRB |= (1<<PB6); //OCR1B
OCR1A = WMITTE; //PWM-Breite auf Mitte setzen.
OCR1B = WMITTE; //PWM-Breite auf Mitte setzen.
}
void loop()
{
OCR1A = WMAX;
OCR1B = WMAX;
delay(3000);
OCR1A = WMITTE;
OCR1B = WMITTE;
delay(3000);
OCR1A = WMIN;
OCR1B = WMIN;
delay(3000);
}
Code 0-33: Beispielprojekt.
PWM mit 50Hz == 0,02s Periode TOP = 16000000/(2*64*50Hz)= 2500 Dauer eines Zählschritts dt = Periode / TOP = 0,02 / 2500 = 0.000008s WMIN = 0,001 / dt = 125 WMAX = 0,002 / dt = 250
Code 0-34: Neukonfiguration des PWM-Signals