Rechnerarchitektur
(EN google-translate)
(PL google-translate)
- Zwischen den 1955 und 1965, als die ersten Großrechner entstanden, arbeitete man in etwas euphorischer Überstrapazierung der Turing-Maschine an einem Konzept für einen GPS, einen "Global Problem Solver".
- Seit den 70er Jahren hat man Abstand von diesem Anspruch genommen.
- Statt dessen ist man dazu übergegangen, Hardware und Software an die Erfordernisse zur Lösung ganz spezieller Probleme anzupassen.
- Ein Ergebnis der sich daraus ergebenden starken Diversifizierung der Soft- und Hardware-Entwicklung, ist der Mikrocontroller.
- Während bei der Entwicklung des PCs eine größtmögliche Flexibilität in den Einsatzgebieten und eine großzügige Benutzerschnittstelle im Fordergrund steht, ist der Mikrocontroller auf Miniaturisierung zum Zwecke der Integration in beliebige Geräte angelegt.
- Sowohl beim PC, als auch beim Mikrocontroller läßt sich noch leicht die Verwandschaft zur Turingmaschine erkennnen:
|
Grundarchitektur Mikrocontroller / PC im Vergleich
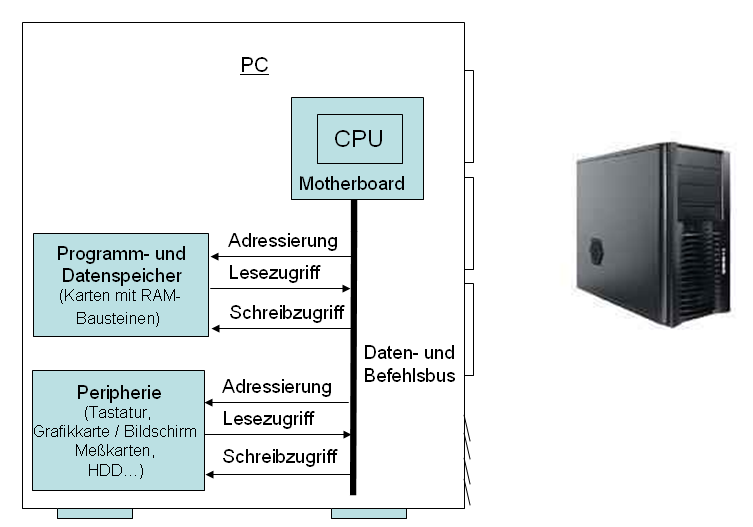
Bild 0-1: PC-Architektur (von Neumann-Architektur)
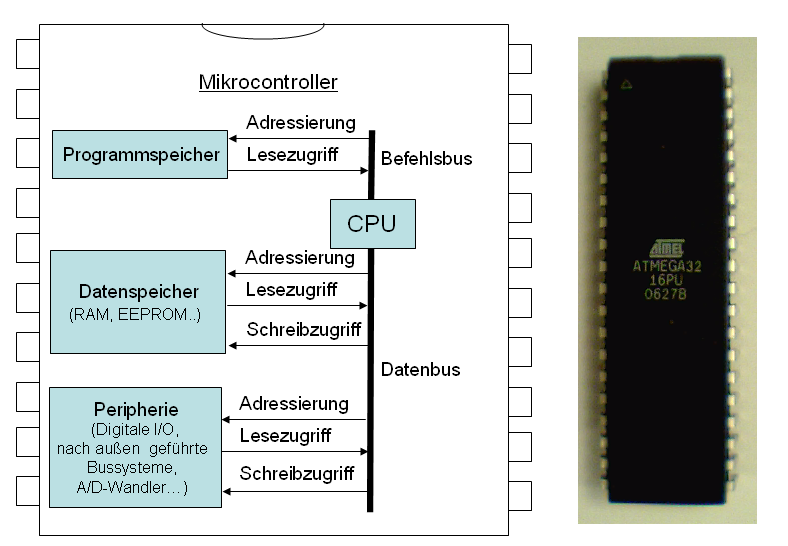
Bild 0-2: Mikrocontroller-Architektur (Harvard-Architektur)
- Die vorangehenden Bilder vergleichen die Architektur eines PCs mit der eines Mikrocontrollers.
- Bedenken Sie: Bei "PC" ist alles gemeint, was beispielsweise in ein Tower-Gehäuse eingebaut wird: Das Motherboard mit der darauf sitzenden CPU (z.B. PenthiumIV oder Athlon-Prozessor) und die eingesteckten Karten.
- Dagegen ist mit "Mikrocontroller" nur das IC, z.B. der abgebildete ATmega32 gemeint.
- Stellen Sie sich zunächst ein "Bussystem" als einen Strang paralleler Leitungen vor, der an verschiedenen Stellen von verschiedenen Komponenten angezapft wird.
- Dabei gibt es Master-Komponenten, die bestimmen, was auf dem Bussystem passiert, hier ist das die CPU und Slave-Komponenten, die auf Anfragen auf dem Bussystem reagieren.
- Bussysteme unterscheiden sich nach Anzahl der Leitungen, der möglichen Übertragungsgeschwindigkeit und dem so genannten Bus-Protokoll, das die Struktur und den zeitlichen Ablauf der auf das Bussystem geschickten Datenpakete beschreibt und wie Kollisionen zwischen lauschenden und sendenden Komponenten vermieden wird.
- Statt eines Datenbands wie bei der Turingmaschine, gibt es also beim PC und beim Mikrocontroller ein- bzw. zwei Bussysteme mit angeschlossenem Daten- und Programmspeicher.
- Nach Neustart des Mikrocontrollers wird aus dem Programmspeicher Befehl für Befehl geladen und abgearbeitet.
|