Informatik -- Lehrveranstaltung vom 22.05.2024
(EN google-translate)
(PL google-translate)
Everything Everywhere All at Once
... angelehnt an den gleichnamigen Film, erschien mir das ein passender Titel dafür, dass nun alles, was bislang behandelt wurde innerhalb eines größeren Projektes verwendet wird.
|
1. Simulationsprogramm in C/C++ quasi als Wiederholung, aber unter Verwendung von Funktionen
Dieses war die Grundstruktur eines Differentialgleichungssystems erster Ordnung, das beispielsweise mittels des Euler-Integrationsverfahrens numerisch gelöst werden kann:
$ \vec \dot y = \vec f\left( \vec y\right) $
Formel 0-1: Differentialgleichungssystem erster Ordnung.
Dies ist ein konkretes Beispiel für ein in dem Fall lineares Differentialgelichungssystem erster Ordnung, ein linearer Feder-Dämpfer-Masse-Schwinger:
$ \left[\begin{array}{cc}\dot x \\ \dot v\end{array}\right] = \left[\begin{array}{cc}v \\ -x-0.3 \cdot v\end{array}\right] $
Formel 0-2: Linearer Feder-Dämpfer-Masse-Schwinger mit konkreten Parametern.
Anfangsbedingungen werden gewählt zu: x0=1m, v0=0m/s mit Teitschrittweite dt=0.01s.
Im Vergleich hierzu, auch mit konkreten Parametern, ist nachfolgend das Differentialgleichungssystem des Räuber-Beute-Modells dargestellt:
$ \left[\begin{array}{cc}\dot B \\ \dot R\end{array}\right]=\left[\begin{array}{cc}B-0.01 \cdot B \cdot R \\ -R+0.01 \cdot B \cdot R\end{array}\right] $
Formel 0-3: Räuber-Beute-Modell mit konkreten Parametern.
Anfangsbedingungen werden gewählt zu: B0=100, R0=10 mit Teitschrittweite dt=0.01Jahre.
Eine einfache Umsetzung in C/C++ der Simulation des Schwingers wäre:
#include <iostream>
using namespace std;
int main(void)
{
double tmax=10.0;
double dt=0.01;
double t=0.0;
double x0=1.0;
double v0=0.0;
double x=x0;
double v=v0;
int anzahl = 0;
while(t<tmax)//Zählen, wieviele Datenelemente benötigt werden.
{
anzahl++;
t+=dt;
}
double arrt[anzahl];
double arrx[anzahl];
double arrv[anzahl];
t=0.0;
for(int i=0;i<anzahl;i++)
{
arrt[i]=t;
arrx[i]=x;
arrv[i]=v;
double xneu = x + (v)*dt;
double vneu = v + (-x-0.3*v)*dt;
x=xneu;
v=vneu;
t+=dt;
}
//Ausgabe für Scilab:
cout<<"t=[";
for(int i=0;i<anzahl;i++)
{
cout<<arrt[i];
if(i<anzahl-1) cout<<",";
}
cout<<"];"<<endl;
cout<<"x=[";
for(int i=0;i<anzahl;i++)
{
cout<<arrx[i];
if(i<anzahl-1) cout<<",";
}
cout<<"];"<<endl;
cout<<"v=[";
for(int i=0;i<anzahl;i++)
{
cout<<arrv[i];
if(i<anzahl-1) cout<<",";
}
cout<<"];"<<endl;
cout<<"plot(t,x,\'blu\',t,v,\'gre\');"<<endl;
return 0;
}
Code 0-1: schwinger.cpp
NEU: Die Daten werden in Scilab als Arrays dargestellt.
Das Programm kann folgendermaßen kompiliert werden: g++ -o schwinger schwinger.cpp Um die Ausgabe in ein Scilab-Skript umzuleiten, kann so vorgegangen werden: ./schwinger > sim.sce Innerhalb von Scilab wird mit cd in den richtigen Pfad navigiert. exec sim.sce führt dann das Skript aus.
Code 0-2: Hinweise zur Umsetzung.
Scilab erzeugt dann folgenden Plot:
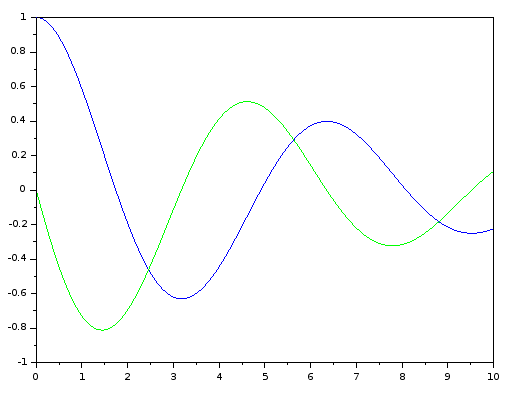
Bild 0-1: In Scilab erzeugter Plot zur Simulation.
Wie können geschickt Funktionen eingesetzt werden, um den Quelltext besser zu strukturieren und Redundanzen zu vermeiden?
Umsetzung erfolgt im Unterricht!
#include <iostream>
using namespace std;
void printScilabArray(char variablenname, double array[],int anzahl)
{
//Ausgabe für Scilab:
cout<<variablenname<<"=[";
for(int i=0;i<anzahl;i++)
{
cout<<array[i];
if(i<anzahl-1) cout<<",";
}
cout<<"];"<<endl;
}
int main(void)
{
double tmax=10.0;
double dt=0.01;
double t=0.0;
double x0=1.0;
double v0=0.0;
double x=x0;
double v=v0;
int anzahl = 0;
while(t<tmax)//Zählen, wieviele Datenelemente benötigt werden.
{
anzahl++;
t+=dt;
}
double arrt[anzahl];
double arrx[anzahl];
double arrv[anzahl];
t=0.0;
for(int i=0;i<anzahl;i++)
{
arrt[i]=t;
arrx[i]=x;
arrv[i]=v;
double xneu = x + (v)*dt;
double vneu = v + (-x-0.3*v)*dt;
x=xneu;
v=vneu;
t+=dt;
}
//Ausgabe für Scilab:
printScilabArray('t',arrt,anzahl);
printScilabArray('x',arrx,anzahl);
printScilabArray('v',arrv,anzahl);
cout<<"plot(t,x,\'blu\',t,v,\'gre\');"<<endl;
return 0;
}
Code 0-3: Einsatz einer Funktion, um den Code effizienter zu machen.
2. Objekt orientierte Übertragung des Simulationsprogramms auf Java/Processing
|
Integrator integrator;
public void setup()
{
size(640,480);
frameRate(50);
integrator = new Integrator(new Modell());
}
double x=1.0;
double v=0.0;
double dt=0.02;
double[] y = new double[] {x,v};
public void draw()
{
background(255);
double[] yneu = integrator.step(y,dt);
fill(255,0,0);
ellipse(width/2,height/2.0f+(float)yneu[0]*200.0f,50,50);
y[0]=yneu[0];
y[1]=yneu[1];
}
Code 0-4: Hauptprogramm.
public class Modell
{
public double[] berechneSteigung(double[] y)
{
double x = y[0];
double v = y[1];
double steigung_x = v;
double steigung_v = -x-0.3*v;
double[] steigung = {steigung_x, steigung_v};
return steigung;
}
}
Code 0-5: Klasse Modell.
public class Integrator
{
Modell modell;
public Integrator(Modell modell)
{
this.modell = modell;
}
public double[] step(double[] y, double dt)
{
double[] steigung = modell.berechneSteigung(y);
double[] yneu = new double[steigung.length];
for(int i=0;i<yneu.length;i++)
yneu[i] = y[i] + steigung[i]*dt;
return yneu;
}
}
Code 0-6: Klasse Integrator.
 Download des Processing-Projektes Schwinger101.zip.
Download des Processing-Projektes Schwinger101.zip.
3. Erweiterung der Klasse Modell um eine Visualisierungsmöglichkeit
Umsetzung im Unterricht!
|
4. ÜBUNG
8.1. Kleine Aufgaben
Aufgabe 8.1.1
|
public void setup()
{
size(640,480);
}
public void draw()
{
background(255,0,0);
fill(0,255,0);
textSize(50);
textAlign(CENTER);
text("Hello World!",width/2,height/2);
}
Code 0-7: Mögliche Lösung eines Hello-World-Programms mit Processing.
Aufgabe 8.1.2
|
public class Messwerte
{
double[] arr = {3.7,6.4,39.3,7.0};
public double getMinimum()
{
double min = arr[0];
for(int i=0;i<arr.length;i++)
if(arr[i]<min)
min = arr[i];
return min;
}
}
public void setup()
{
Messwerte mess = new Messwerte();
double ergebnis = mess.getMinimum();
println("Minimum ist:"+ergebnis);
}
Code 0-8: Simple Java-Lösung.
public class Messwerte
{
double[] arr = new double[1000];
int anzahl=0;
public void add(double x)
{
arr[anzahl]=x;
anzahl++;
}
public double getMinimum()
{
double min = arr[0];
for(int i=0;i<anzahl;i++)
if(arr[i]<min)
min = arr[i];
return min;
}
}
public void setup()
{
Messwerte mess = new Messwerte();
Messwerte mess2 = new Messwerte();
mess.add(3.9);
mess.add(-3.9);
mess.add(1.9);
mess2.add(-7.9);
mess2.add(-0.9);
mess2.add(0.9);
double ergebnis = mess.getMinimum();
println("Minimum bei mess ist:"+ergebnis);
println("Minimum bei mess2 ist:"+mess2.getMinimum());
}
Code 0-9: Beispiellösung zur Java-Version mit zwei Messwert-Objekten.
Aufgabe 8.1.3
|
#include<iostream>
using namespace std;
int main(void)
{
int x;
int y=-1;
cout<<"Geben Sie beliebig viele positive Zahlen ein! 0 beendet das Programm und gibt den größten Wert aus."<<endl;
do
{
cin>>x;
if(x > y )
{
y=x;
}
} while(x!=0);
cout<<"Der größte Wert ist "<< y <<endl;
return 0;
}
Code 0-10: Studentische Lösung.
Aufgabe 8.1.4
|
|
int x=-100,y=-100;
public void setup()
{
size(640,480);
}
public void draw()
{
background(0,0,255);
fill(255);
ellipse(mouseX,mouseY,30,30);
fill(255,0,0);
ellipse(x,y,30,30);
}
public void mouseClicked()
{
x=mouseX;
y=mouseY;
}
Code 0-11: Beispiellösung.
Aufgabe 8.1.5 -- spannende Sachen mit Java/Processing machen
|
|