Projektstudium im Wintersemester 2025/26
(EN google-translate)
(PL google-translate)
|
|
Projektstudium Montag, 17.11.2025
Themen
|
1. Organisatorisches -- Idee zur zeitlichen Organisation der Fächer "Projektstudium" und "Simulations- und Regelungstechnik"
MONTAG 10:15-11:45 Vorlesung, Thema OOP (gehört zu Simulations- und Regelungstechnik, Grundlagen sowohl für das Projektstudium als auch für Simulations- und Regelungstechnik) 12:15-15:15 Projektstudium und Konsultationen DIENSTAG 8:30-10 Kernvorlesung Simulations- und Regelungstechnik 10-11:30 erster Übungsblock 12:15-13:45 zweiter Übungsblock MITTWOCH 10:30-13:30 Projektstudium und Konsultationen (erste zwei Stunden überlappen sich mit der Projektarbeit eines Masterkurses)
Code 0-1: Idee zur zeitlichen Organisation der Fächer "Projektstudium" und "Simulations- und Regelungstechnik"
2. Vorstellung möglicher Projektthemen
|
3. Projekt Museumsroboter
Ein historisches Beispiel
|
 http://www.seins-form.de/work/projekte/roboter/
https://www.youtube.com/watch?v=RR1yTaHp2g4
http://www.seins-form.de/work/projekte/roboter/
https://www.youtube.com/watch?v=RR1yTaHp2g4
Die drei Roboter hatten klare Aufgaben:
|
Das Design orientierte sich an der jeweiligen Aufgabe.
"Spielen" -- der "Mach was"-Roboter
Aktuelles überarbeitetes Konzept: https://www.mfk-berlin.de/
Aufbau eines Roboter-THB-Guides unter Verwendung eines lokalen großen Sprachmodells als verteiltes System
|
|
Idee für ein Grundkonzept: Die Module kommunizieren über WiFi unter Ausnutzung von Websockets, oder UDP oder des MQTT Protokolls
https://de.wikipedia.org/wiki/User_Datagram_Protocol
https://de.wikipedia.org/wiki/MQTT
https://blog.doubleslash.de/software-technologien/mqtt-fuer-dummies/
 Hinweise zu Internetprogrammierung
Hinweise zu Internetprogrammierung
Vorteil von Modulen, die über WiFi miteinander kommunizieren:
|
Lokales Large Language Model (LLM)
Auf der Grundlage des nachfolgenden kostenfreien und quelloffenen Projektes ist es sehr leicht geworden, ein LLM lokal zu installieren:
WIE ES GEHT: https://www.linux-community.de/ausgaben/linuxuser/2024/09/ki-chatbots-lokal-ohne-cloudanbindung-nutzen/
INSTALLER: https://www.nomic.ai/gpt4all
https://de.wikipedia.org/wiki/Large_Language_Model
Roboter-THB-Guide rund um ein LLM
Ein Test mit gpt4all unter Verwendung des deutschen Sprachmodells "Mistral":

Bild 0-1: Ein Test mit gpt4all unter Verwendung des deutschen Sprachmodells "Mistral".
Folgende Komponenten liegen nahe zu besitzen:
|
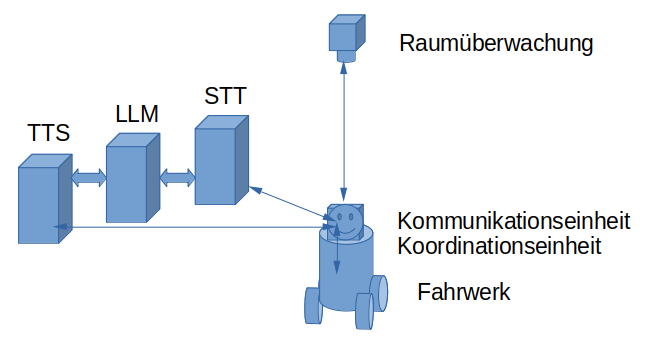
Bild 0-2: Komponenten und ihre Vernetzung beim THB-Guide.
Fragen
|
Frühere Konzeptstudie im Vergleich:
THB-Robot: https://youtu.be/0B8kjcCu4zk

Bild 0-3: THB-Robot.
Warum einen einzelnen Roboter verwenden, wenn man flexibler mit einem Schwarm ist?
Schwarm statt einzelner Roboter: https://youtu.be/YS-1RRLGtgQ
siehe auch: 05_esp32AV/30_esp32swarm
Variante mit induktiver Ladevorrichtung: https://youtu.be/60fEn0f_MnM
siehe auch: 83_AV/03_Umsetzung/05_TURTLE
Thunfischschwarm aus "Findet Nemo": https://www.youtube.com/watch?v=gArrbrjUlnA
Warum einen Roboter bauen, wenn Besucher*Innen ebensogut die Funktionalität als Smartwatch mit sich tragen können?
Steuerung einer Smarthome-Lampe per Smartwatch über UDP https://youtu.be/KKv1UixNgjY
siehe auch: 06_TWATCH
ähnliche Ansteuerung, aber Verwendung eines Arduino nano 33 IoT: https://youtu.be/22C3ua4X7wA
Erstsemesterprojekt Staubsaugroboter: https://youtu.be/wX4kJfI7e8A
siehe auch: 83_AV/07_Saugroboter
Linienverfolgung mit esp32 mit Videostream per WiFi: https://youtu.be/N0bxvH8GV-A
Verwendung einer GPU: 84_Jetson
4. Vorlesung OOP
|
Präsentation zu TTS auf der Basis Android-Processing
siehe auch: 94_VSI/03_TTS
https://android.processing.org/
36_Java
78_Processing
79_Deep_Learning
5. Gruppenbildung und Themenwahl
6. Start der Projektgruppen
7. GETROFFENE VEREINBARUNGEN
|
BEIDE GRUPPEN...
|
AUFGABENTEILE der Kart-Gruppe, KLEINES FAHRZEUG (vorläufig / unvollständig)
|
AUFGABENTEILE der Kart-Gruppe, GROSSES FAHRZEUG (vorläufig / unvollständig)
|
AUFGABENTEILE der Roboter Guide-Gruppe (vorläufig / unvollständig)
|
Projektstudium Montag, 24.11.2025
Themen
|
1. Organisatorisches
|
2. Vorlesung OOP von SRT, siehe dort day by day.
siehe: kramann.info/03_WS2025_26/04_SRT_day_by_day
3. Übung zur Vorlesung OOP von SRT
siehe: kramann.info/03_WS2025_26/04_SRT_day_by_day
4. Projektangebot Gruppe "Roboter Guide"
5. Projektangebot Gruppe "Kart"
6. Start der Projektarbeit in beiden Gruppen
Projektstudium Montag, 08.12.2025
Verwendung von gpt4all mit Processing
|
 GPT4ALL_001.zip -- Testweise einfache Anfrage über HTTP bei gpt4all als Processing-Sketch.
GPT4ALL_001.zip -- Testweise einfache Anfrage über HTTP bei gpt4all als Processing-Sketch.
'{
"model": "Phi-3 Mini Instruct",
"messages": [{"role":"user","content":"hi, who are you?"}],
"max_tokens": 2048,
"temperature": 0.7
}'
Code 0-2: Anfrage im JSON Format.
Reponse Content:{"choices":[{"finish_reason":"stop","index":0,"logprobs":null,"message":{"content": ////
" Hello! I'm an AI digital assistant designed to provide information, answer questions, ////
and assist with various tasks. How can I help you today?","role":"assistant"},"references":null}], ////
"created":1765194858,"id":"placeholder","model":"Phi-3 Mini Instruct","object":"chat.completion", ////
"usage":{"completion_tokens":31,"prompt_tokens":11,"total_tokens":42}}
Reponse Content-Length Header: 436
Code 0-3: Antwort von gpt4all
Quelle für ein JSON-Beispiel mit Processing: https://stackoverflow.com/questions/32382005/how-could-i-do-the-same-with-processing-that-this-curl-command-does
GPT4ALL_002.zip -- wie oben, aber Verwendung des deutschen LLM "EM German Mistral".
TTS001_2025.zip -- TTS mit Processing (tts library muss installiert sein)
Vergleiche: https://stackoverflow.com/questions/53008424/how-to-fix-error-cannot-be-cast-to-com-sun-speech-freetts-voicedirectory
Projektstudium Montag, 15.12.2025 -- Praktische Einführung zur Verwendung von WiFi mit UDP
Themen
|
1. Hinweise zu Internetprogrammierung
67_Echtzeitsysteme/09_Internetprogrammierung
67_Echtzeitsysteme/09_Internetprogrammierung/04_Java
2. Einrichtung eines Hotspots bei einem Android Device
05_esp32AV/01_Bauanleitung/01_Elektronik_und_Software/03_Videostream -- siehe Hotspot einrichten und starten und Bild 0-1
3. Einrichtung eines Hotspots bei einem einfachen Router
05_esp32AV/01_Bauanleitung/03_FAQs -- siehe unten bei "#9 Wie sollte ein W-LAN-Router für das esp32AV eingerichtet werden?"
4. Einrichten eines Hotspots bei einem Laptop unter Linux Xubuntu
08_Archiv/06_Ing/01_Bauplan/04_Hotspot
5. Datenübertragung mittels UDP zwischen zwei Processing-Programmen
|
|
6. Datenübertragung mittels UDP bei einem Arduino-Mirkocontroller am Beispiel des Arduino NANO 33 IoT
96_Arduino/30_Arduino_33_nano_IoT --- ganz ganz unten: "UPDATE 1 IMU Datenaustausch"
|
7. Datenübertragung mittels UDP bei einem Android-Device
|
8. Datenübertragung mittels UDP bei einem ESP32 Mikrocontroller
06_TWATCH/04_Simplified_Commands -- siehe WiFi.
Im Unterricht entstandene Processing-Projekte
UDP001_lokal.zip
UDP002empfangen.zip
UDP002senden.zip
UDP002sendenANDROID.zip -- Processing-Projekt für ein Android Device
Zahlen als Zeichenkette senden und beim Empfänger zurück wandeln:
UDP003senden.zip
UDP003empfangen.zip
Projektstudium Montag, 05.01.2026
Themen
|
1. Organisatorisches
Bitte laden Sie folgende Inhalte bis zum 12.01. auf Moodle hoch:
Kurs ID: 10943
|
2. Projektbericht als Webseite auf kramann.info
Sie finden eine Beschreibung dazu, wie Webseiten für kramann.info erstellt werden sollten unter nachfolgendem Link:
89_Beispielseiten
Sie finden lokal auf den Linux-PCs ein älteres Abbild von kramann.info, an dem Sie sich orientieren können:
|
Durch Drücken des Knopfes "slide" oben rechts werden Fließtexte (#p) temporär verborgen.
So sehen die obigen Angaben im "Kurzschrift-Format" folgendermaßen aus:
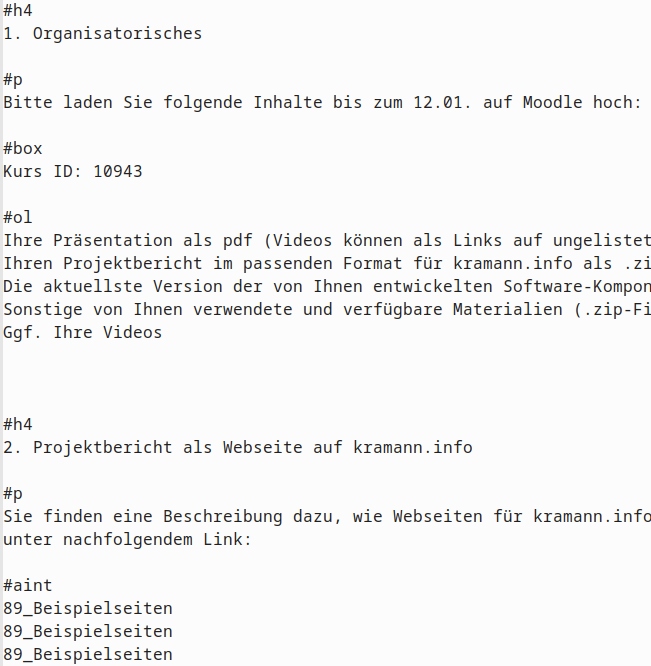
Bild 0-4: Obigen Angaben im "Kurzschrift-Format".
Ein paar Hinweise:
|
77_Mein_Bericht 01_Zusammenfassung 02_Einleitung 02_Hauptteil 03_Fazit
Code 0-4: Ordnerstruktur
Wählen Sie spezifische Namen, keine allgemeinen! Beispielsweise 02_Technikstand_LLMs statt 02_Einleitung
Ergänzend sei hier die Struktur für die day_by_day-Seiten ergänzt:
03_WS2025_26.zip
Einführung zu PHP:
67_Echtzeitsysteme/09_Internetprogrammierung/02_PHP_Programmierung
67_Echtzeitsysteme/09_Internetprogrammierung/03_PHP_OOP